 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfined Space Underwater Positioning Using Collaborative Robots
Oct 31, 2025Positioning of underwater robots in confined and cluttered spaces remains a key challenge for field operations. Existing systems are mostly designed for large, open-water environments and struggle in industrial settings due to poor coverage, reliance on external infrastructure, and the need for feature-rich surroundings. Multipath effects from continuous sound reflections further degrade signal quality, reducing accuracy and reliability. Accurate and easily deployable positioning is essential for repeatable autonomous missions; however, this requirement has created a technological bottleneck limiting underwater robotic deployment. This paper presents the Collaborative Aquatic Positioning (CAP) system, which integrates collaborative robotics and sensor fusion to overcome these limitations. Inspired by the "mother-ship" concept, the surface vehicle acts as a mobile leader to assist in positioning a submerged robot, enabling localization even in GPS-denied and highly constrained environments. The system is validated in a large test tank through repeatable autonomous missions using CAP's position estimates for real-time trajectory control. Experimental results demonstrate a mean Euclidean distance (MED) error of 70 mm, achieved in real time without requiring fixed infrastructure, extensive calibration, or environmental features. CAP leverages advances in mobile robot sensing and leader-follower control to deliver a step change in accurate, practical, and infrastructure-free underwater localization.
Millimeter-Wave Sensing for Avoidance of High-Risk Ground Conditions for Mobile Robots
Mar 30, 2022
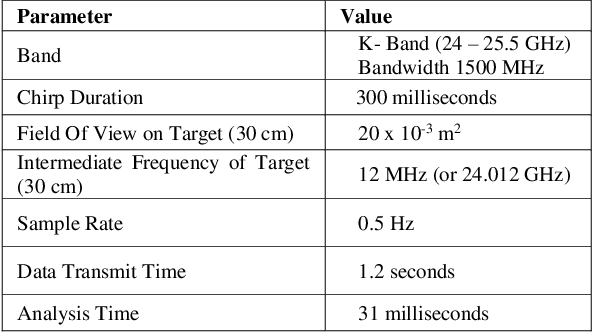
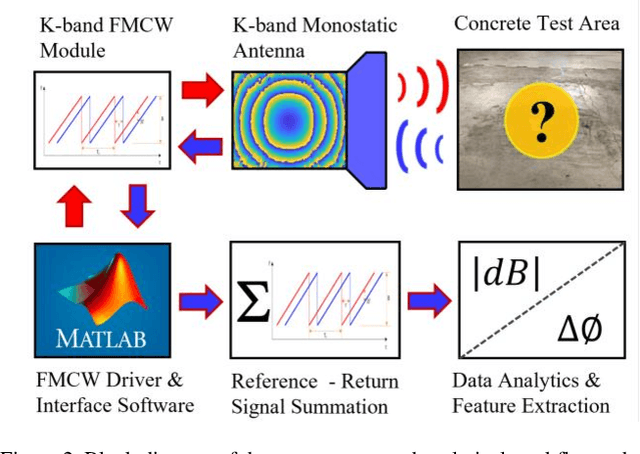
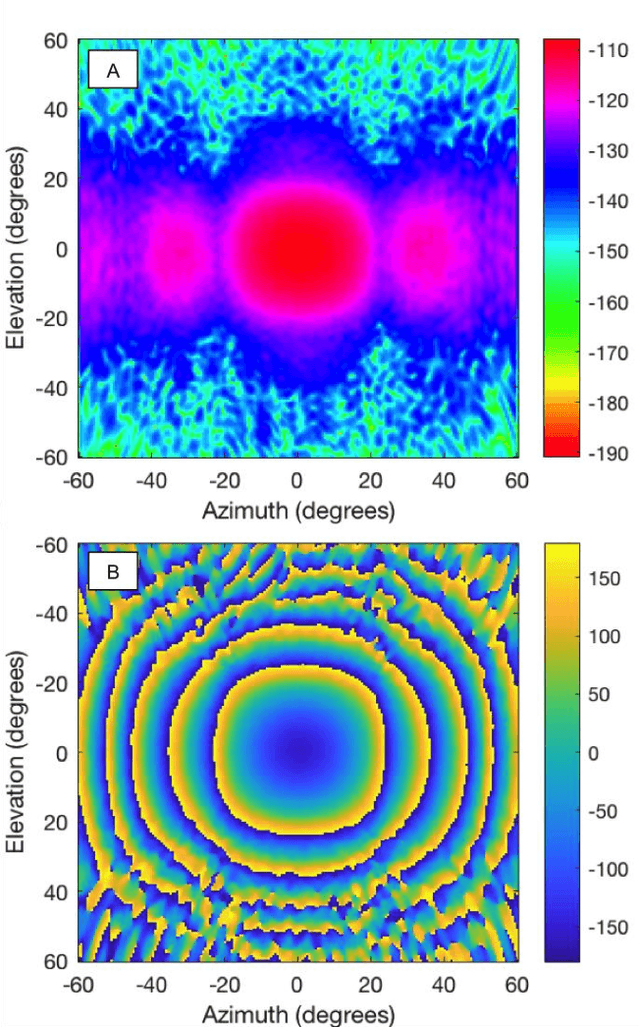
Mobile robot autonomy has made significant advances in recent years, with navigation algorithms well developed and used commercially in certain well-defined environments, such as warehouses. The common link in usage scenarios is that the environments in which the robots are utilized have a high degree of certainty. Operating environments are often designed to be robot friendly, for example augmented reality markers are strategically placed and the ground is typically smooth, level, and clear of debris. For robots to be useful in a wider range of environments, especially environments that are not sanitized for their use, robots must be able to handle uncertainty. This requires a robot to incorporate new sensors and sources of information, and to be able to use this information to make decisions regarding navigation and the overall mission. When using autonomous mobile robots in unstructured and poorly defined environments, such as a natural disaster site or in a rural environment, ground condition is of critical importance and is a common cause of failure. Examples include loss of traction due to high levels of ground water, hidden cavities, or material boundary failures. To evaluate a non-contact sensing method to mitigate these risks, Frequency Modulated Continuous Wave (FMCW) radar is integrated with an Unmanned Ground Vehicle (UGV), representing a novel application of FMCW to detect new measurands for Robotic Autonomous Systems (RAS) navigation, informing on terrain integrity and adding to the state-of-the-art in sensing for optimized autonomous path planning. In this paper, the FMCW is first evaluated in a desktop setting to determine its performance in anticipated ground conditions. The FMCW is then fixed to a UGV and the sensor system is tested and validated in a representative environment containing regions with significant levels of ground water saturation.