 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust, Occlusion-aware Pose Estimation for Objects Grasped by Adaptive Hands
Mar 07, 2020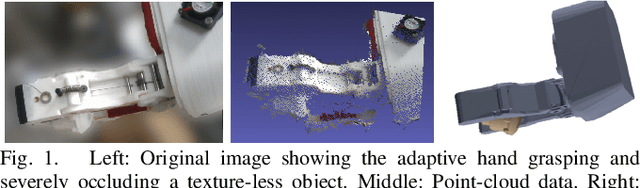
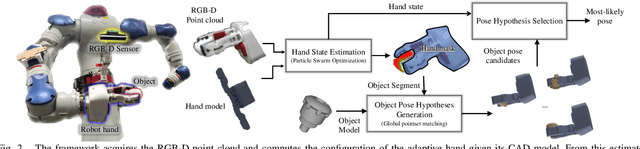
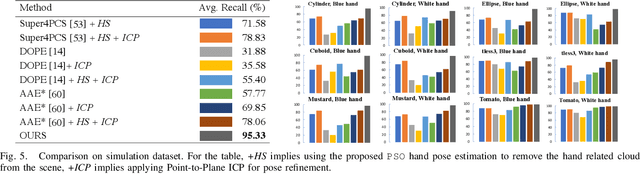
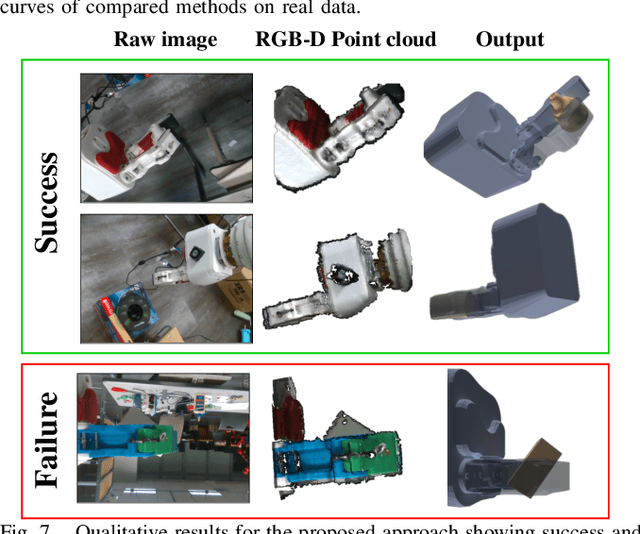
Many manipulation tasks, such as placement or within-hand manipulation, require the object's pose relative to a robot hand. The task is difficult when the hand significantly occludes the object. It is especially hard for adaptive hands, for which it is not easy to detect the finger's configuration. In addition, RGB-only approaches face issues with texture-less objects or when the hand and the object look similar. This paper presents a depth-based framework, which aims for robust pose estimation and short response times. The approach detects the adaptive hand's state via efficient parallel search given the highest overlap between the hand's model and the point cloud. The hand's point cloud is pruned and robust global registration is performed to generate object pose hypotheses, which are clustered. False hypotheses are pruned via physical reasoning. The remaining poses' quality is evaluated given agreement with observed data. Extensive evaluation on synthetic and real data demonstrates the accuracy and computational efficiency of the framework when applied on challenging, highly-occluded scenarios for different object types. An ablation study identifies how the framework's components help in performance. This work also provides a dataset for in-hand 6D object pose estimation. Code and dataset are available at: https://github.com/wenbowen123/icra20-hand-object-pose
Fast, Anytime Motion Planning for Prehensile Manipulation in Clutter
Feb 11, 2019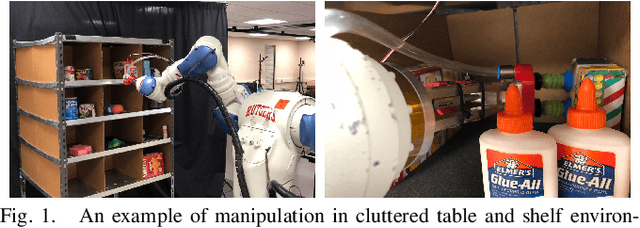
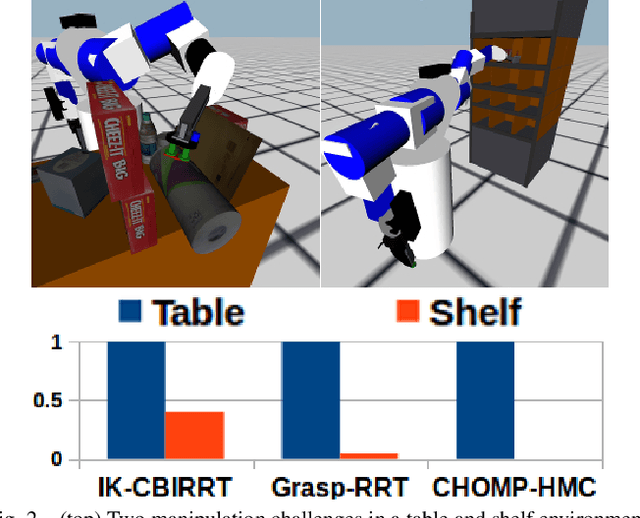
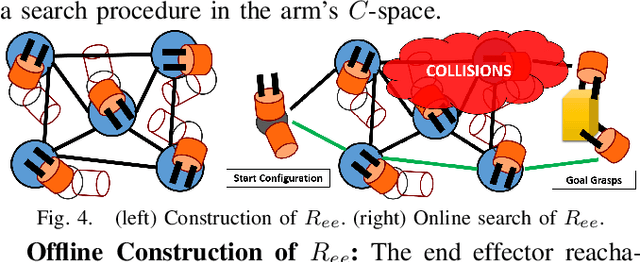
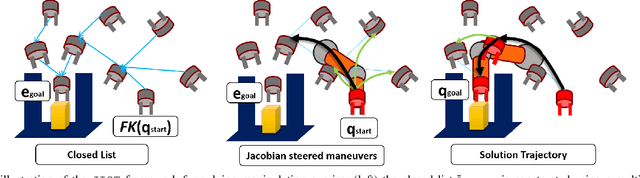
Many methods have been developed for planning the motion of robotic arms for picking and placing, ranging from local optimization to global search techniques, which are effective for sparsely placed objects. Dense clutter, however, still adversely affects the success rate, computation times, and quality of solutions in many real-world setups. The current work integrates tools from existing methodologies and proposes a framework that achieves high success ratio in clutter with anytime performance. The idea is to first explore the lower dimensional end effector's task space efficiently by ignoring the arm, and build a discrete approximation of a navigation function, which guides the end effector towards the set of available grasps or object placements. This is performed online, without prior knowledge of the scene. Then, an informed sampling-based planner for the entire arm uses Jacobian-based steering to reach promising end effector poses given the task space guidance. While informed, the method is also comprehensive and allows the exploration of alternative paths over time if the task space guidance does not lead to a solution. This paper evaluates the proposed method against alternatives in picking or placing tasks among varying amounts of clutter for a variety of robotic manipulators with different end-effectors. The results suggest that the method reliably provides higher quality solution paths quicker, with a higher success rate relative to alternatives.
Fast Model Identification via Physics Engines for Data-Efficient Policy Search
Jun 13, 2018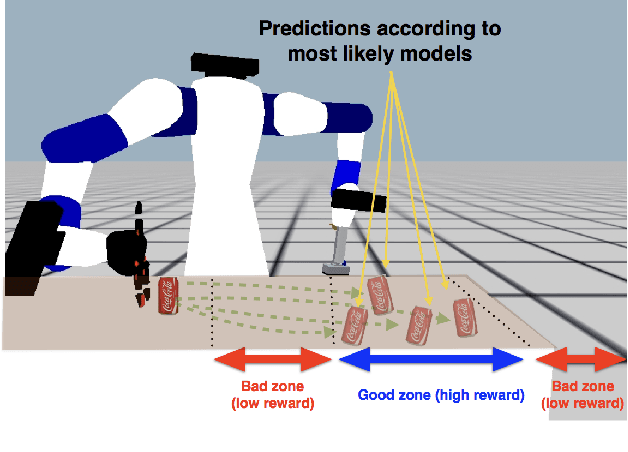
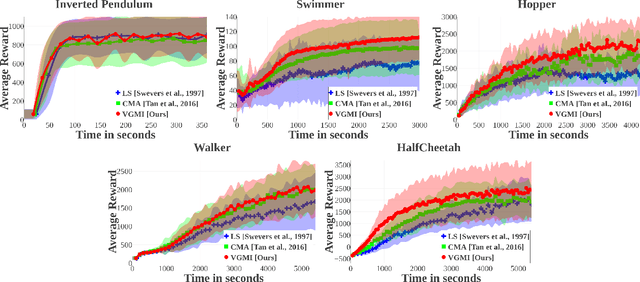
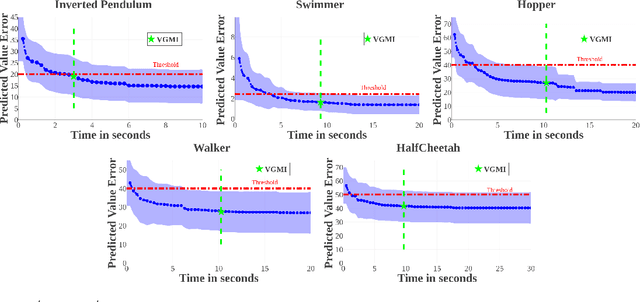
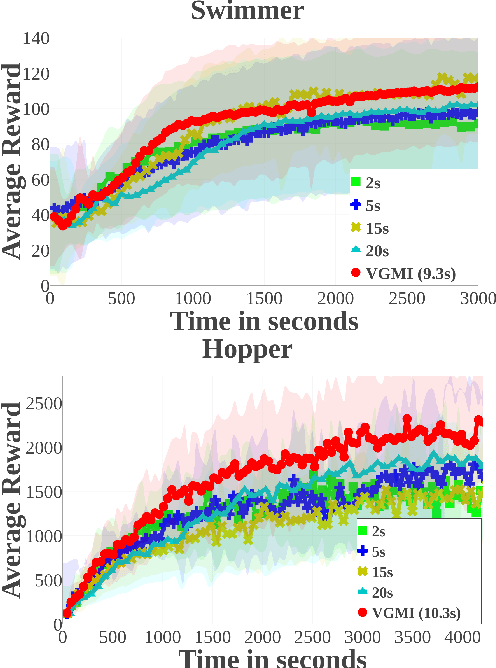
This paper presents a method for identifying mechanical parameters of robots or objects, such as their mass and friction coefficients. Key features are the use of off-the-shelf physics engines and the adaptation of a Bayesian optimization technique towards minimizing the number of real-world experiments needed for model-based reinforcement learning. The proposed framework reproduces in a physics engine experiments performed on a real robot and optimizes the model's mechanical parameters so as to match real-world trajectories. The optimized model is then used for learning a policy in simulation, before real-world deployment. It is well understood, however, that it is hard to exactly reproduce real trajectories in simulation. Moreover, a near-optimal policy can be frequently found with an imperfect model. Therefore, this work proposes a strategy for identifying a model that is just good enough to approximate the value of a locally optimal policy with a certain confidence, instead of wasting effort on identifying the most accurate model. Evaluations, performed both in simulation and on a real robotic manipulation task, indicate that the proposed strategy results in an overall time-efficient, integrated model identification and learning solution, which significantly improves the data-efficiency of existing policy search algorithms.
Information-theoretic Model Identification and Policy Search using Physics Engines with Application to Robotic Manipulation
Mar 22, 2017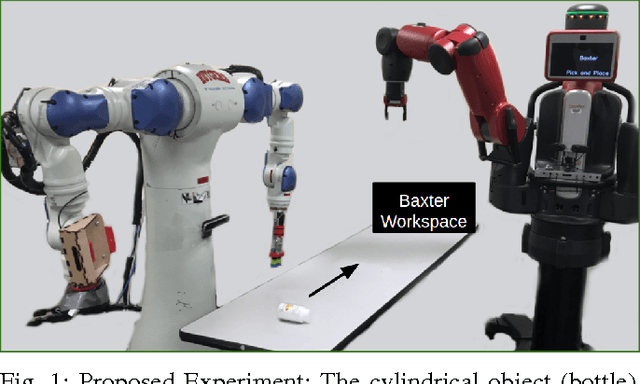
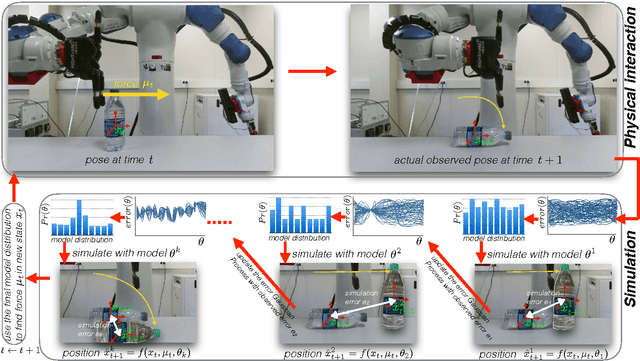
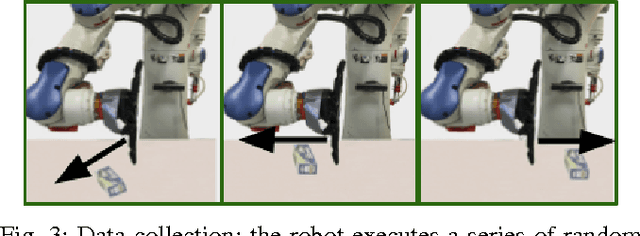
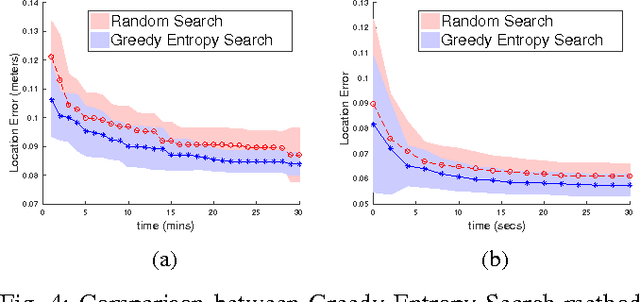
We consider the problem of a robot learning the mechanical properties of objects through physical interaction with the object, and introduce a practical, data-efficient approach for identifying the motion models of these objects. The proposed method utilizes a physics engine, where the robot seeks to identify the inertial and friction parameters of the object by simulating its motion under different values of the parameters and identifying those that result in a simulation which matches the observed real motions. The problem is solved in a Bayesian optimization framework. The same framework is used for both identifying the model of an object online and searching for a policy that would minimize a given cost function according to the identified model. Experimental results both in simulation and using a real robot indicate that the proposed method outperforms state-of-the-art model-free reinforcement learning approaches.
Similar Part Rearrangement With Pebble Graphs
Apr 25, 2014
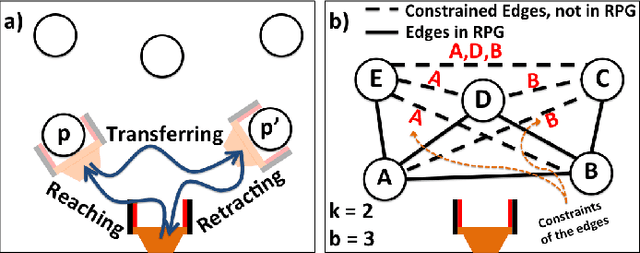
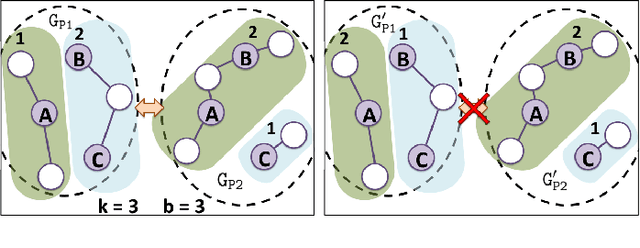
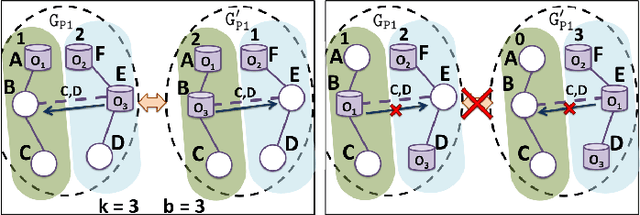
This work proposes a method for effectively computing manipulation paths to rearrange similar objects in a cluttered space. The solution can be used to place similar products in a factory floor in a desirable arrangement or for retrieving a particular object from a shelf blocked by similarly sized objects. These are challenging problems as they involve combinatorially large, continuous configuration spaces due to the presence of multiple moving bodies and kinematically complex manipulators. This work leverages ideas from algorithmic theory, multi-robot motion planning and manipulation planning to propose appropriate graphical representations for this challenge. These representations allow to quickly reason whether manipulation paths allow the transition between entire sets of objects arrangements without having to explicitly enumerate the path for each pair of arrangements. The proposed method also allows to take advantage of precomputation given a manipulation roadmap for transferring a single object in the same cluttered space. The resulting approach is evaluated in simulation for a realistic model of a Baxter robot and executed in open-loop on the real system, showing that the approach solves complex instances and is promising in terms of scalability and success ratio.