 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime Segmented Beamforming via Dynamic Programming: Theory and Implementation
May 24, 2026In dynamic acoustic environments with time-varying interferers, effective beamforming requires identifying stationary regions over time. The Capon beamformer, a whitened matched filter constrained to maintain unity gain in the desired direction, theoretically relies on the instantaneous ensemble covariance matrix. Practical implementations rely on the batch Capon (or Sample Matrix Inversion), which estimates the sample covariance matrix (SCM) by averaging over a block of snapshots. This practical approach implicitly assumes that the data within the batch window is stationary and can be coherently combined. In non-stationary settings, a batch approach that averages over fixed or excessively long windows fails, as moving interferers smear the SCM and degrade the beamformer's nulling capabilities. To address this, this paper introduces a temporally segmented distortionless response beamformer. Inspired by the segmented least squares method, which fits piecewise polynomials to data while penalizing excessive segmentation to prevent overfitting, the framework extends practical Capon beamforming by incorporating data-driven temporal segmentation. This formulation minimizes output power while dynamically adapting the SCM estimation windows to local stationarity, offering a principled approach to tracking time-varying interferers.
Transmit Beamforming for High-Rate Underwater Acoustic Communications
May 14, 2026Transmit beamforming for underwater acoustic communication is challenging because it requires perfect knowledge of the channel to the receiver in advance. In practice, channel estimates must be learned through feedback and are often noisy or outdated because of feedback delay and channel variation. In this paper, we investigate angle-based beamforming strategies for a single-user link that reduce dependence on full channel knowledge by exploiting stable components of the geometric structure in the propagation field. In particular, we focus on scenarios in which there exists a dominant path that remains relatively stable over time, making it a suitable candidate for transmit beamforming. Experimental results using the SPACE and MACE data sets demonstrate the effectiveness of the proposed method in terms of data-detection mean-squared error and bit error rate.
Mismatch-Robust Underwater Acoustic Localization Using A Differentiable Modular Forward Model
Mar 30, 2025



In this paper, we study the underwater acoustic localization in the presence of environmental mismatch. Especially, we exploit a pre-trained neural network for the acoustic wave propagation in a gradient-based optimization framework to estimate the source location. To alleviate the effect of mismatch between the training data and the test data, we simultaneously optimize over the network weights at the inference time, and provide conditions under which this method is effective. Moreover, we introduce a physics-inspired modularity in the forward model that enables us to learn the path lengths of the multipath structure in an end-to-end training manner without access to the specific path labels. We investigate the validity of the assumptions in a simple yet illustrative environment model.
Joint Source-Environment Adaptation for Deep Learning-Based Underwater Acoustic Source Ranging
Mar 30, 2025



In this paper, we propose a method to adapt a pre-trained deep-learning-based model for underwater acoustic localization to a new environment. We use unsupervised domain adaptation to improve the generalization performance of the model, i.e., using an unsupervised loss, fine-tune the pre-trained network parameters without access to any labels of the target environment or any data used to pre-train the model. This method improves the pre-trained model prediction by coupling that with an almost independent estimation based on the received signal energy (that depends on the source). We show the effectiveness of this approach on Bellhop generated data in an environment similar to that of the SWellEx-96 experiment contaminated with real ocean noise from the KAM11 experiment.
Joint Source-Environment Adaptation of Data-Driven Underwater Acoustic Source Ranging Based on Model Uncertainty
Mar 30, 2025



Adapting pre-trained deep learning models to new and unknown environments is a difficult challenge in underwater acoustic localization. We show that although pre-trained models have performance that suffers from mismatch between the training and test data, they generally exhibit a higher ``implied uncertainty'' in environments where there is more mismatch. Leveraging this notion of implied uncertainty, we partition the test samples into more certain and less certain sets, and implement an estimation method using the certain samples to improve the labeling for uncertain samples, which helps to adapt the model. We use an efficient method to quantify model prediction uncertainty, and an innovative approach to adapt a pre-trained model to unseen underwater environments at test time. This eliminates the need for labeled data from the target environment or the original training data. This adaptation is enhanced by integrating an independent estimate based on the received signal energy. We validate the approach extensively using real experimental data, as well as synthetic data consisting of model-generated signals with real ocean noise. The results demonstrate significant improvements in model prediction accuracy, underscoring the potential of the method to enhance underwater acoustic localization in diverse, noisy, and unknown environments.
Estimating the Number and Locations of Boundaries in Reverberant Environments with Deep Learning
Nov 04, 2024



Underwater acoustic environment estimation is a challenging but important task for remote sensing scenarios. Current estimation methods require high signal strength and a solution to the fragile echo labeling problem to be effective. In previous publications, we proposed a general deep learning-based method for two-dimensional environment estimation which outperformed the state-of-the-art, both in simulation and in real-life experimental settings. A limitation of this method was that some prior information had to be provided by the user on the number and locations of the reflective boundaries, and that its neural networks had to be re-trained accordingly for different environments. Utilizing more advanced neural network and time delay estimation techniques, the proposed improved method no longer requires prior knowledge the number of boundaries or their locations, and is able to estimate two-dimensional environments with one or two boundaries. Future work will extend the proposed method to more boundaries and larger-scale environments.
Unsupervised Opinion Aggregation -- A Statistical Perspective
Aug 20, 2023



Complex decision-making systems rarely have direct access to the current state of the world and they instead rely on opinions to form an understanding of what the ground truth could be. Even in problems where experts provide opinions without any intention to manipulate the decision maker, it is challenging to decide which expert's opinion is more reliable -- a challenge that is further amplified when decision-maker has limited, delayed, or no access to the ground truth after the fact. This paper explores a statistical approach to infer the competence of each expert based on their opinions without any need for the ground truth. Echoing the logic behind what is commonly referred to as \textit{the wisdom of crowds}, we propose measuring the competence of each expert by their likeliness to agree with their peers. We further show that the more reliable an expert is the more likely it is that they agree with their peers. We leverage this fact to propose a completely unsupervised version of the na\"{i}ve Bayes classifier and show that the proposed technique is asymptotically optimal for a large class of problems. In addition to aggregating a large block of opinions, we further apply our technique for online opinion aggregation and for decision-making based on a limited the number of opinions.
Online Segmented Recursive Least-Squares for Multipath Doppler Tracking
May 30, 2023


Underwater communication signals typically suffer from distortion due to motion-induced Doppler. Especially in shallow water environments, recovering the signal is challenging due to the time-varying Doppler effects distorting each path differently. However, conventional Doppler estimation algorithms typically model uniform Doppler across all paths and often fail to provide robust Doppler tracking in multipath environments. In this paper, we propose a dynamic programming-inspired method, called online segmented recursive least-squares (OSRLS) to sequentially estimate the time-varying non-uniform Doppler across different multipath arrivals. By approximating the non-linear time distortion as a piece-wise-linear Markov model, we formulate the problem in a dynamic programming framework known as segmented least-squares (SLS). In order to circumvent an ill-conditioned formulation, perturbations are added to the Doppler model during the linearization process. The successful operation of the algorithm is demonstrated in a simulation on a synthetic channel with time-varying non-uniform Doppler.
Towards Robust Data-Driven Underwater Acoustic Localization: A Deep CNN Solution with Performance Guarantees for Model Mismatch
May 29, 2023

Key challenges in developing underwater acoustic localization methods are related to the combined effects of high reverberation in intricate environments. To address such challenges, recent studies have shown that with a properly designed architecture, neural networks can lead to unprecedented localization capabilities and enhanced accuracy. However, the robustness of such methods to environmental mismatch is typically hard to characterize, and is usually assessed only empirically. In this work, we consider the recently proposed data-driven method [19] based on a deep convolutional neural network, and demonstrate that it can learn to localize in complex and mismatched environments. To explain this robustness, we provide an upper bound on the localization mean squared error (MSE) in the ``true" environment, in terms of the MSE in a ``presumed" environment and an additional penalty term related to the environmental discrepancy. Our theoretical results are corroborated via simulation results in a rich, highly reverberant, and mismatch channel.
Through Tissue Ultra-high-definition Video Transmission Using an Ultrasound Communication Channel
Oct 18, 2022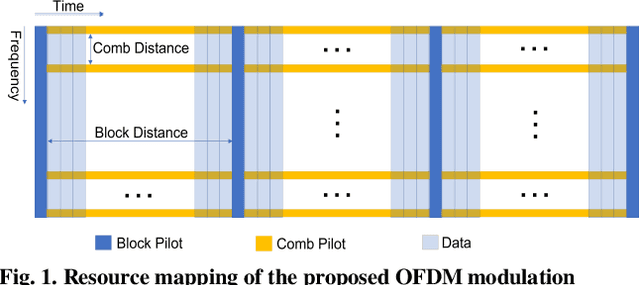
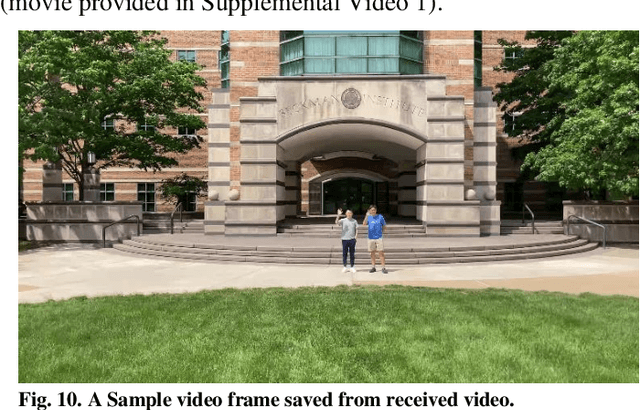
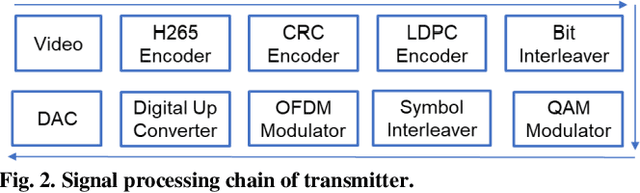
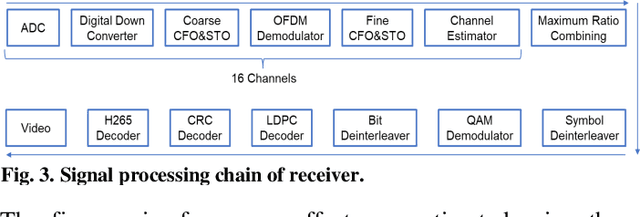
Wireless capsule endoscopy (WCE) has been widely adopted as complementary to traditional wired gastroendoscopy, especially for small bowel diseases which are beyond the latter's reach. However, both the video resolution and frame rates are limited in current WCE solutions due to the limited wireless data rate. The reasons behind this are that the electromagnetic (EM), radio frequency (RF) based communication scheme used by WCE has strict limits on useable bandwidth and power, and the high attenuation in the human body compared to air. Ultrasound communication could be a potential alternative solution as it has access to much higher bandwidths and transmitted power with much lower attenuation. In this paper, we propose an ultrasound communication scheme specially designed for high data rate through tissue data transmission and validate this communication scheme by successfully transmitting ultra-high-definition (UHD) video (3840*2160 pixels at 60 FPS) through 5 cm of pork belly. Over 8.3 Mbps error free payload data rate was achieved with the proposed communication scheme and our custom-built field programmable gate array (FPGA) based test platform.