 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating the Number and Locations of Boundaries in Reverberant Environments with Deep Learning
Nov 04, 2024



Underwater acoustic environment estimation is a challenging but important task for remote sensing scenarios. Current estimation methods require high signal strength and a solution to the fragile echo labeling problem to be effective. In previous publications, we proposed a general deep learning-based method for two-dimensional environment estimation which outperformed the state-of-the-art, both in simulation and in real-life experimental settings. A limitation of this method was that some prior information had to be provided by the user on the number and locations of the reflective boundaries, and that its neural networks had to be re-trained accordingly for different environments. Utilizing more advanced neural network and time delay estimation techniques, the proposed improved method no longer requires prior knowledge the number of boundaries or their locations, and is able to estimate two-dimensional environments with one or two boundaries. Future work will extend the proposed method to more boundaries and larger-scale environments.
MazeNet: An Accurate, Fast, and Scalable Deep Learning Solution for Steiner Minimum Trees
Oct 24, 2024The Obstacle Avoiding Rectilinear Steiner Minimum Tree (OARSMT) problem, which seeks the shortest interconnection of a given number of terminals in a rectilinear plane while avoiding obstacles, is a critical task in integrated circuit design, network optimization, and robot path planning. Since OARSMT is NP-hard, exact algorithms scale poorly with the number of terminals, leading practical solvers to sacrifice accuracy for large problems. We propose MazeNet, a deep learning-based method that learns to solve the OARSMT from data. MazeNet reframes OARSMT as a maze-solving task that can be addressed with a recurrent convolutional neural network (RCNN). A key hallmark of MazeNet is its scalability: we only need to train the RCNN blocks on mazes with a small number of terminals; larger mazes can be solved by replicating the same pre-trained blocks to create a larger network. Across a wide range of experiments, MazeNet achieves perfect OARSMT-solving accuracy, significantly reduces runtime compared to classical exact algorithms, and can handle more terminals than state-of-the-art approximate algorithms.
Direct Localization in Underwater Acoustics via Convolutional Neural Networks: A Data-Driven Approach
Jul 20, 2022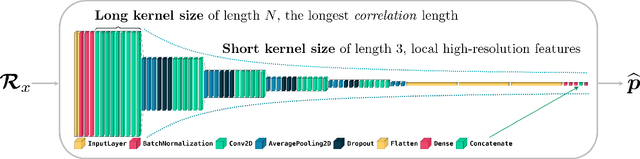
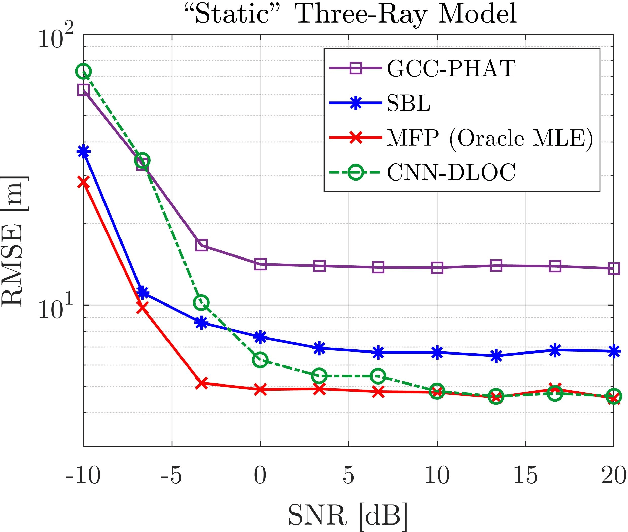
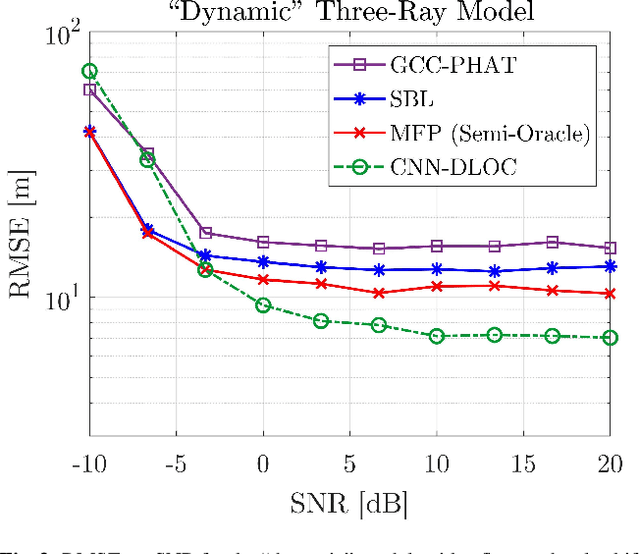
Direct localization (DLOC) methods, which use the observed data to localize a source at an unknown position in a one-step procedure, generally outperform their indirect two-step counterparts (e.g., using time-difference of arrivals). However, underwater acoustic DLOC methods require prior knowledge of the environment, and are computationally costly, hence slow. We propose, what is to the best of our knowledge, the first data-driven DLOC method. Inspired by classical and contemporary optimal model-based DLOC solutions, and leveraging the capabilities of convolutional neural networks (CNNs), we devise a holistic CNN-based solution. Our method includes a specifically-tailored input structure, architecture, loss function, and a progressive training procedure, which are of independent interest in the broader context of machine learning. We demonstrate that our method outperforms attractive alternatives, and asymptotically matches the performance of an oracle optimal model-based solution.
A Semi-Blind Method for Localization of Underwater Acoustic Sources
Oct 27, 2021


Underwater acoustic localization has traditionally been challenging due to the presence of unknown environmental structure and dynamic conditions. The problem is richer still when such structure includes occlusion, which causes the loss of line-of-sight (LOS) between the acoustic source and the receivers, on which many of the existing localization algorithms rely. We develop a semi-blind passive localization method capable of accurately estimating the source's position even in the possible absence of LOS between the source and all receivers. Based on typically-available prior knowledge of the water surface and bottom, we derive a closed-form expression for the optimal estimator under a multi-ray propagation model, which is suitable for shallow-water environments and high-frequency signals. By exploiting a computationally efficient form of this estimator, our methodology makes comparatively high-resolution localization feasible. We also derive the Cram\'er-Rao bound for this model, which can be used to guide the placement of collections of receivers so as to optimize localization accuracy. The method improves a balance of accuracy and robustness to environmental model mismatch, relative to existing localization methods that are useful in similar settings. The method is validated with simulations and water tank experiments.