 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEO-Agents: A Three-Agent LLM Pipeline for Earth Observation Hypothesis Generation
Jul 02, 2026Large language models have recently been explored for scientific hypothesis generation, but most prior work relies on unstructured literature and free-form textual claims. We present a pipeline for Earth observation that grounds hypothesis generation directly in the NASA Earth Observation Knowledge Graph. A heterogeneous graph neural network trained on historical co-usage relations ranks candidate dataset pairings, and a three-agent LLM pipeline filters, generates, and evaluates structured research hypotheses. Applied to 1,475 NASA datasets, the system produces 160 hypotheses spanning multiple Earth-science domains, including ecohydrology, glaciology, aerosol--cloud interactions, vegetation phenology, and stratospheric chemistry. Model-predicted novel dataset pairings are rated nearly as plausible as held-out real co-usages from the literature, indicating that the pipeline surfaces scientifically coherent yet unexplored combinations. A 2*2*2 factorial experiment across GPT-5.2 and Claude Sonnet 4.6 shows that hypothesis rankings remain stable, while absolute scores depend strongly on judge identity, highlighting limitations of single-judge LLM evaluation.
Towards Automated Air Traffic Safety Assessment Around Non-Towered Airports Using Large Language Models
May 12, 2026We investigate frameworks for post-flight safety analysis at non-towered airports using large language models (LLMs). Non-towered airports rely on the Common Traffic Advisory Frequency (CTAF) for air traffic coordination and experience frequent near mid-air collisions due to the pilot self-announcement communication protocol. We propose a general vision-language model (VLM) approach to analyze the transcribed CTAF radio communications in natural language, METeorological Aerodrome Report (METAR) weather data, Automatic Dependent Surveillance-Broadcast (ADS-B) flight trajectories, and Visual Flight Rules sectional charts of the airfield. We provide a preliminary study at Half Moon Bay Airport, with a qualitative real world case study and a quantitative evaluation using a new synthetic dataset of communications and weather modalities. We qualitatively evaluate our framework on real flight data using Gemini 2.5 Pro, demonstrating accurate identification of a right-of-way violation. The synthetic dataset is derived from real examples and includes a 12-category hazard taxonomy, and is used to benchmark three open-source (Qwen 2.5-7B, Mistral-7B, Gemma-2-9B) and three closed-source (GPT-4o, GPT-5.4, Claude Sonnet 4.6) LLM models on the subset of inputs related to CTAF and METAR. Even limited to CTAF and METAR inputs and open source LLMs, instances of our framework typically achieve a macro F1 score above 0.85 on a binary nominal/danger classification task. Future work includes a quantitative evaluation across all modalities and a larger number of real world examples. Taken together, our results suggest that VLM analysis of safety at non-towered airports may be a valuable future capability.
Reinforcement Learning with Latent State Inference for Autonomous On-ramp Merging under Observation Delay
Mar 19, 2024



This paper presents a novel approach to address the challenging problem of autonomous on-ramp merging, where a self-driving vehicle needs to seamlessly integrate into a flow of vehicles on a multi-lane highway. We introduce the Lane-keeping, Lane-changing with Latent-state Inference and Safety Controller (L3IS) agent, designed to perform the on-ramp merging task safely without comprehensive knowledge about surrounding vehicles' intents or driving styles. We also present an augmentation of this agent called AL3IS that accounts for observation delays, allowing the agent to make more robust decisions in real-world environments with vehicle-to-vehicle (V2V) communication delays. By modeling the unobservable aspects of the environment through latent states, such as other drivers' intents, our approach enhances the agent's ability to adapt to dynamic traffic conditions, optimize merging maneuvers, and ensure safe interactions with other vehicles. We demonstrate the effectiveness of our method through extensive simulations generated from real traffic data and compare its performance with existing approaches. L3IS shows a 99.90% success rate in a challenging on-ramp merging case generated from the real US Highway 101 data. We further perform a sensitivity analysis on AL3IS to evaluate its robustness against varying observation delays, which demonstrates an acceptable performance of 93.84% success rate in 1-second V2V communication delay.
A Survey on Reinforcement Learning in Aviation Applications
Nov 03, 2022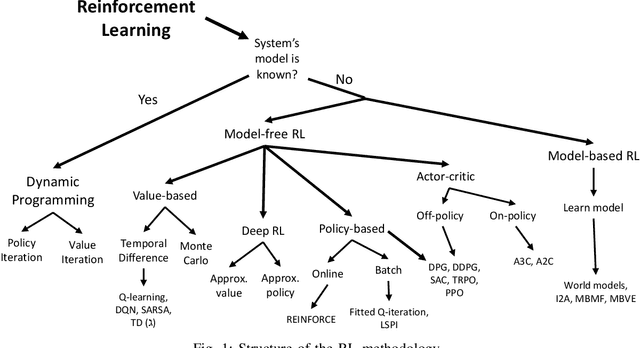
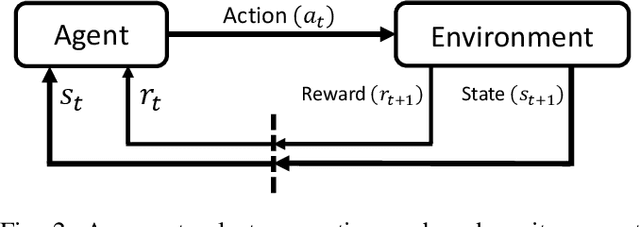
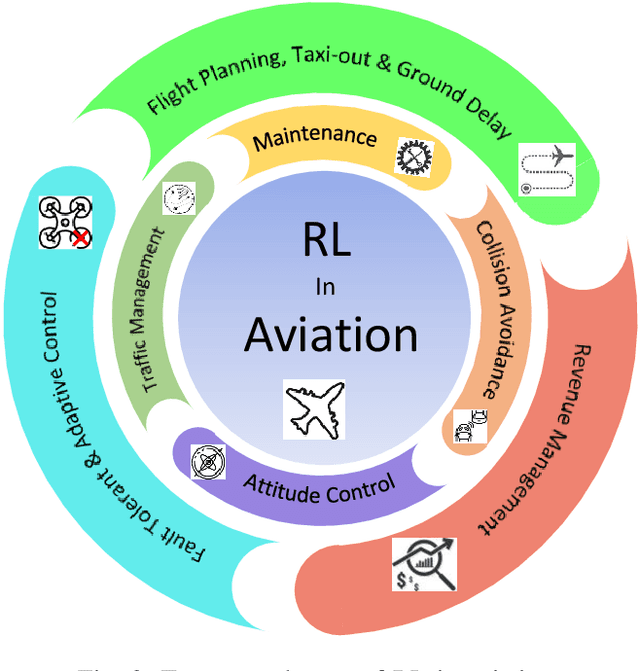

Compared with model-based control and optimization methods, reinforcement learning (RL) provides a data-driven, learning-based framework to formulate and solve sequential decision-making problems. The RL framework has become promising due to largely improved data availability and computing power in the aviation industry. Many aviation-based applications can be formulated or treated as sequential decision-making problems. Some of them are offline planning problems, while others need to be solved online and are safety-critical. In this survey paper, we first describe standard RL formulations and solutions. Then we survey the landscape of existing RL-based applications in aviation. Finally, we summarize the paper, identify the technical gaps, and suggest future directions of RL research in aviation.