 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotics Under Construction: Challenges on Job Sites
Jun 24, 2025



As labor shortages and productivity stagnation increasingly challenge the construction industry, automation has become essential for sustainable infrastructure development. This paper presents an autonomous payload transportation system as an initial step toward fully unmanned construction sites. Our system, based on the CD110R-3 crawler carrier, integrates autonomous navigation, fleet management, and GNSS-based localization to facilitate material transport in construction site environments. While the current system does not yet incorporate dynamic environment adaptation algorithms, we have begun fundamental investigations into external-sensor based perception and mapping system. Preliminary results highlight the potential challenges, including navigation in evolving terrain, environmental perception under construction-specific conditions, and sensor placement optimization for improving autonomy and efficiency. Looking forward, we envision a construction ecosystem where collaborative autonomous agents dynamically adapt to site conditions, optimizing workflow and reducing human intervention. This paper provides foundational insights into the future of robotics-driven construction automation and identifies critical areas for further technological development.
Mine Tunnel Exploration using Multiple Quadrupedal Robots
Sep 20, 2019
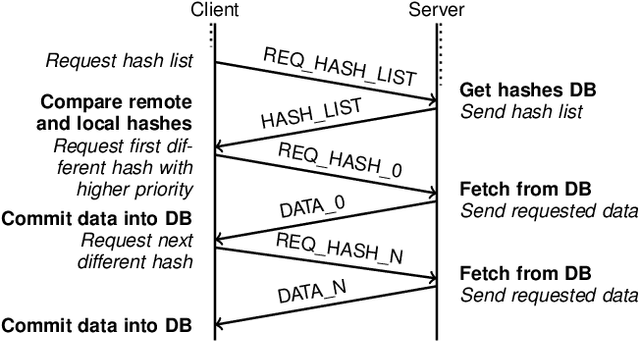
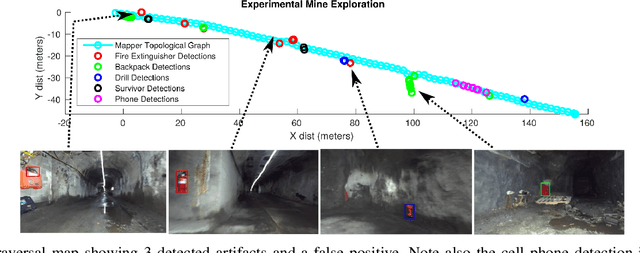
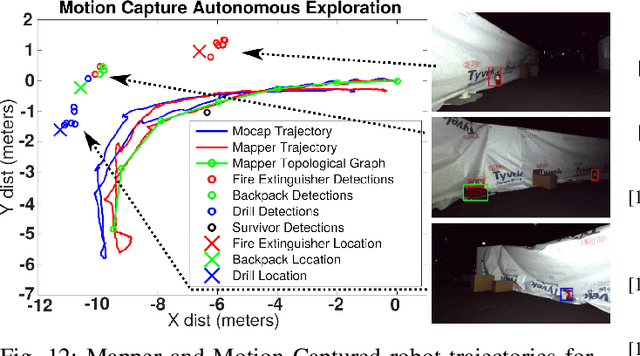
Robotic exploration of underground environments is a particularly challenging problem due to communication, endurance, and traversability constraints which necessitate high degrees of autonomy and agility. These challenges are further enhanced by the need to minimize human intervention for practical applications. While legged robots have the ability to traverse extremely challenging terrain, they also engender further inherent challenges for planning, estimation, and control. In this work, we describe a fully autonomous system for multi-robot mine exploration and mapping using legged quadrupeds, as well as a distributed database mesh networking system for reporting data. In addition, we show results from the DARPA Subterranean Challenge (SubT) Tunnel Circuit demonstrating localization of artifacts after traversals of hundreds of meters. To our knowledge, these experiments represent the first fully autonomous exploration of an unknown GNSS-denied environment undertaken by legged robots.