 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-World LoRaWAN Performance and Propagation Modeling Using UAV, Helikite, and Vehicle-Based Measurements
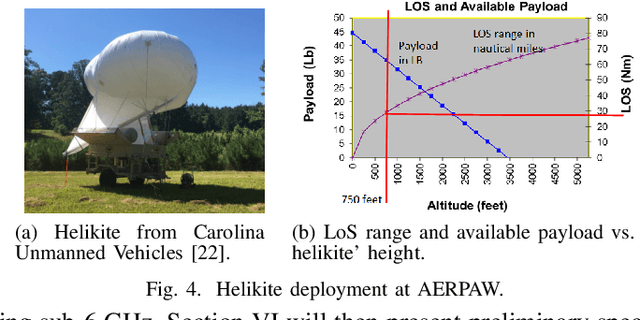
Apr 07, 2026This paper presents a field-based evaluation of Long Range Wide Area Network (LoRaWAN) signal propagation conducted at two locations within the Aerial Experimentation and Research Platform for Advanced Wireless (AERPAW) testbed: Lake Wheeler Field and NC State University's Centennial Campus. Three distinct transmission platforms were deployed, a ground vehicle, a multirotor drone at 50 meters, and a helikite at a steady altitude of 150 meters and 300 meters approximately. These platforms enabled a comparative study on how altitude, mobility, and terrain influence wireless signal reception across a LoRaWAN gateway network. We analyze received signal strength (RSSI) and signal-to-noise ratio (SNR) as functions of distance and spreading factor (SF). Three complementary metrics are visualized: SNR versus distance with demodulation thresholds, probability of successful reception, and SNR boxplots grouped by distance bins. These plots reveal link degradation patterns and demonstrate the role of adaptive SF selection in maintaining communication reliability. To characterize propagation behavior, we apply a log-distance path loss model to empirical data from the ground vehicle experiment, which encompass both rural and urban non-line-of-sight (NLOS) conditions. Model parameters are optimized through error minimization techniques. Our results show that the helikite platform, due to its stable high-altitude position, provided the most reliable and consistent link performance. Conversely, the drone and vehicle exhibited higher variability due to movement, obstructions, and terrain-induced multipath. These findings demonstrate the influence of platform dynamics and altitude on LoRaWAN reception performance, providing support for future aerial network planning efforts.
Modeling and Analysis of Air-to-Ground Cellular KPIs in a 5G Testbed using Android Smartphones
Apr 06, 2026The integration of cellular communication with Unmanned Aerial Vehicles (UAVs) extends the range of command and control and payload communications of autonomous UAV applications. Accurate modeling of this air-to-ground wireless environment aids UAV mission planning. Models built on and insights obtained from real-life experiments intricately capture the variations in air-to-ground link quality with UAV position, offering more fidelity for simulations and system design than those that rely on generic theoretical models designed for ground scenarios or ray-tracing simulations. In this work, we conduct aerial flights at the Aerial Experimentation and Research Platform for Advanced Wireless (AERPAW) Lake Wheeler testbed to study the variation in key performance indicators (KPIs) of a private 4G/5G cellular base station (BS) with the UAV's altitude, distance from the BS, elevation, and azimuth relative to the BS. Variations in 4G and 5G physical layer KPIs and application layer throughput are logged and analyzed, using two Android smartphones: a Keysight Nemo device, with enhanced KPI access, through a rooted operating system, and a standard smartphone running a custom application that utilizes open-source Android APIs. The observed signal strength measurements are compared to theoretical predictions from free space path loss models that incorporate the BS antenna radiation patterns. Mathematical model parameters for polynomial curve approximations are derived to fit the observed data. Light machine learning approaches, namely random forests, gradient boosting regressors and neural networks, are used to model KPI behaviour as a function of UAV position relative to the BS. The insights and models generated from real-life experiments in this study can serve as valuable tools in the design, simulation and deployment of cellular communication-based UAV systems.
Impact of Altitude, Bandwidth, and NLOS Bias on TDOA-Based 3D UAV Localization: Experimental Results and CRLB Analysis
Feb 03, 2025



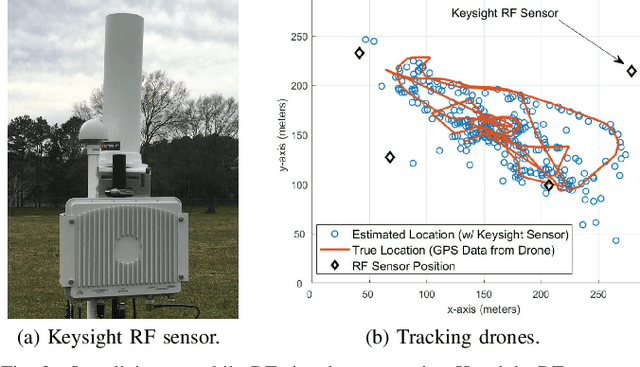
This paper investigates unmanned aerial vehicle (UAV) localization using time difference of arrival (TDOA) measurements under mixed line-of-sight (LOS) and non-line-of-sight (NLOS) conditions. A 3D TDOA Cram\'er-Rao lower bound (CRLB) model is developed accounting for varying altitudes and signal bandwidths. The model is compared to five real-world UAV flight experiments conducted at different altitudes (40 m, 70 m, 100 m) and bandwidths (1.25 MHz, 2.5 MHz, 5 MHz) using Keysight N6841A radio frequency (RF) sensors of the NSF AERPAW platform. Results show that altitude, bandwidth, and NLOS obstructions significantly impact localization accuracy. Higher bandwidths enhance signal time resolution, while increased altitudes mitigate multipath and NLOS biases, both contributing to improved performance. However, hovering close to RF sensors degrades accuracy due to antenna pattern misalignment and geometric dilution of precision. These findings emphasize the inadequacy of traditional LOS-based models in NLOS environments and highlight the importance of adaptive approaches for accurate localization in challenging scenarios.
Digital Twins for Supporting AI Research with Autonomous Vehicle Networks
Apr 01, 2024



Digital twins (DTs), which are virtual environments that simulate, predict, and optimize the performance of their physical counterparts, are envisioned to be essential technologies for advancing next-generation wireless networks. While DTs have been studied extensively for wireless networks, their use in conjunction with autonomous vehicles with programmable mobility remains relatively under-explored. In this paper, we study DTs used as a development environment to design, deploy, and test artificial intelligence (AI) techniques that use real-time observations, e.g. radio key performance indicators, for vehicle trajectory and network optimization decisions in an autonomous vehicle networks (AVN). We first compare and contrast the use of simulation, digital twin (software in the loop (SITL)), sandbox (hardware-in-the-loop (HITL)), and physical testbed environments for their suitability in developing and testing AI algorithms for AVNs. We then review various representative use cases of DTs for AVN scenarios. Finally, we provide an example from the NSF AERPAW platform where a DT is used to develop and test AI-aided solutions for autonomous unmanned aerial vehicles for localizing a signal source based solely on link quality measurements. Our results in the physical testbed show that SITL DTs, when supplemented with data from real-world (RW) measurements and simulations, can serve as an ideal environment for developing and testing innovative AI solutions for AVNs.
National Radio Dynamic Zone Concept with Autonomous Aerial and Ground Spectrum Sensors
Mar 17, 2022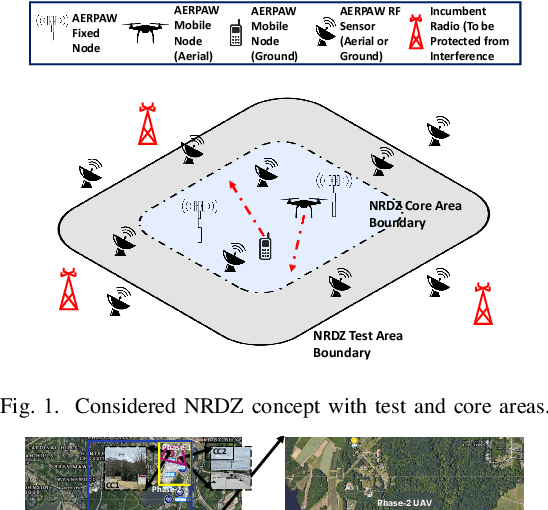
National radio dynamic zone (NRDZs) are intended to be geographically bounded areas within which controlled experiments can be carried out while protecting the nearby licensed users of the spectrum. An NRDZ will facilitate research and development of new spectrum technologies, waveforms, and protocols, in typical outdoor operational environments of such technologies. In this paper, we introduce and describe an NRDZ concept that relies on a combination of autonomous aerial and ground sensor nodes for spectrum sensing and radio environment monitoring (REM). We elaborate on key characteristics and features of an NRDZ to enable advanced wireless experimentation while also coexisting with licensed users. Some preliminary results based on simulation and experimental evaluations are also provided on out-of-zone leakage monitoring and real-time REMs.