 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Hybrid Learner for Simultaneous Localization and Mapping
Jan 04, 2021

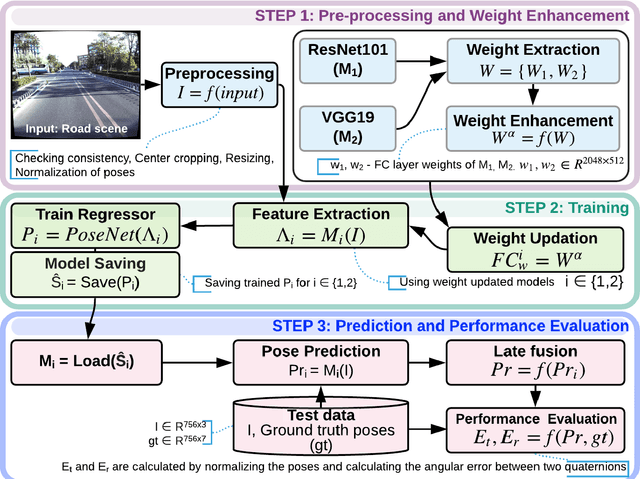
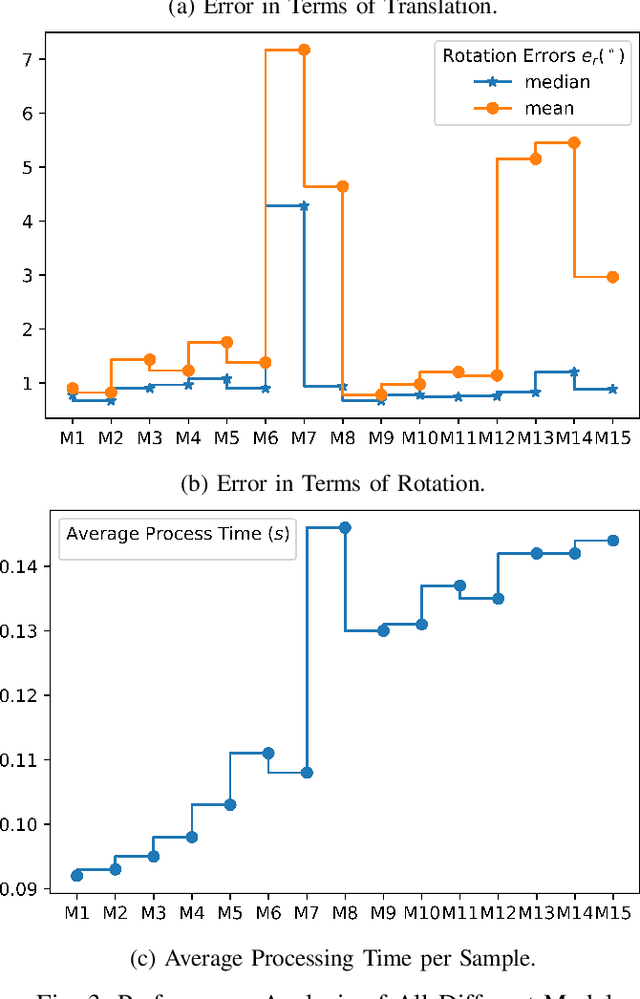
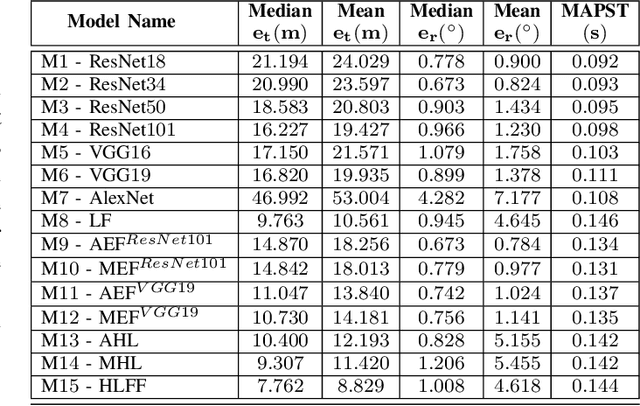
Simultaneous localization and mapping (SLAM) is used to predict the dynamic motion path of a moving platform based on the location coordinates and the precise mapping of the physical environment. SLAM has great potential in augmented reality (AR), autonomous vehicles, viz. self-driving cars, drones, Autonomous navigation robots (ANR). This work introduces a hybrid learning model that explores beyond feature fusion and conducts a multimodal weight sewing strategy towards improving the performance of a baseline SLAM algorithm. It carries out weight enhancement of the front end feature extractor of the SLAM via mutation of different deep networks' top layers. At the same time, the trajectory predictions from independently trained models are amalgamated to refine the location detail. Thus, the integration of the aforesaid early and late fusion techniques under a hybrid learning framework minimizes the translation and rotation errors of the SLAM model. This study exploits some well-known deep learning (DL) architectures, including ResNet18, ResNet34, ResNet50, ResNet101, VGG16, VGG19, and AlexNet for experimental analysis. An extensive experimental analysis proves that hybrid learner (HL) achieves significantly better results than the unimodal approaches and multimodal approaches with early or late fusion strategies. Hence, it is found that the Apolloscape dataset taken in this work has never been used in the literature under SLAM with fusion techniques, which makes this work unique and insightful.
Deep learning and high harmonic generation
Jan 04, 2021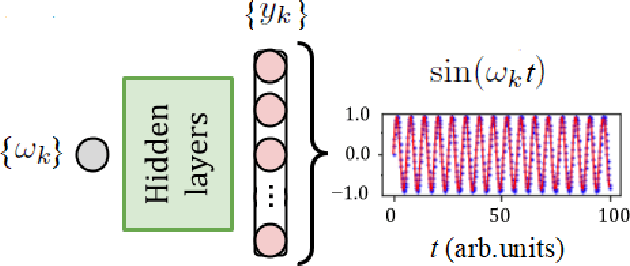
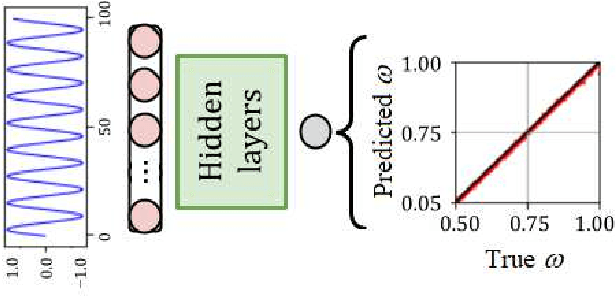
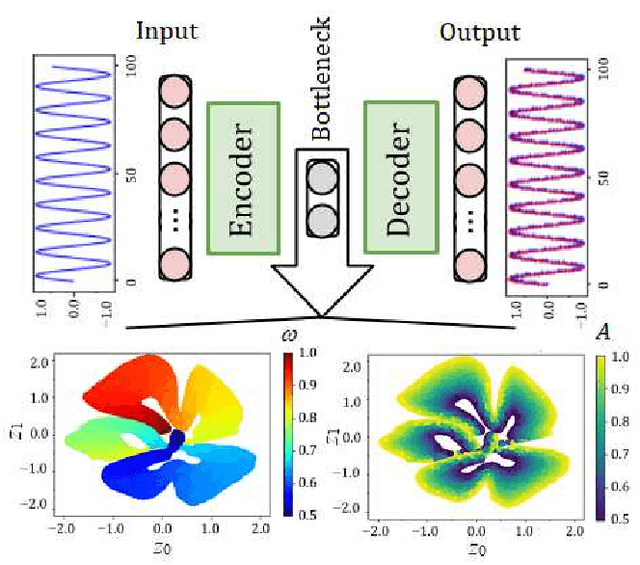
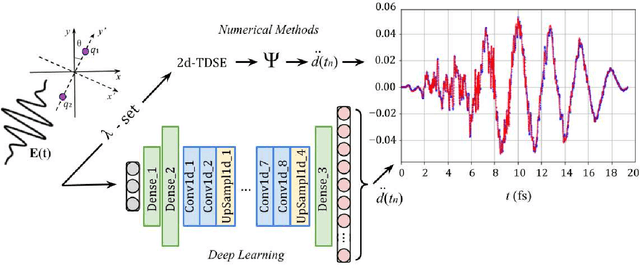
Using machine learning, we explore the utility of various deep neural networks (NN) when applied to high harmonic generation (HHG) scenarios. First, we train the NNs to predict the time-dependent dipole and spectra of HHG emission from reduced-dimensionality models of di- and triatomic systems based of on sets of randomly generated parameters (laser pulse intensity, internuclear distance, and molecular orientation). These networks, once trained, are useful tools to rapidly generate the HHG spectra of our systems. Similarly, we have trained the NNs to solve the inverse problem - to determine the molecular parameters based on HHG spectra or dipole acceleration data. These types of networks could then be used as spectroscopic tools to invert HHG spectra in order to recover the underlying physical parameters of a system. Next, we demonstrate that transfer learning can be applied to our networks to expand the range of applicability of the networks with only a small number of new test cases added to our training sets. Finally, we demonstrate NNs that can be used to classify molecules by type: di- or triatomic, symmetric or asymmetric, wherein we can even rely on fairly simple fully connected neural networks. With outlooks toward training with experimental data, these NN topologies offer a novel set of spectroscopic tools that could be incorporated into HHG experiments.
Sketch-based community detection in evolving networks
Sep 24, 2020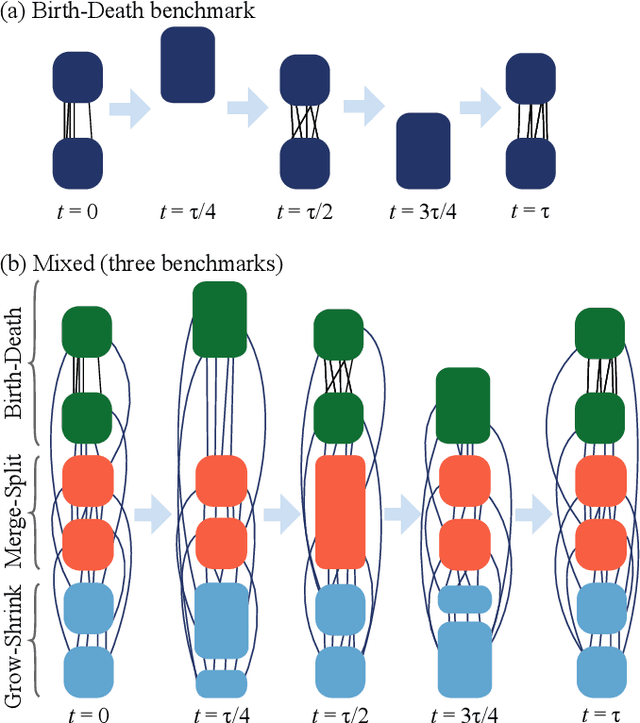
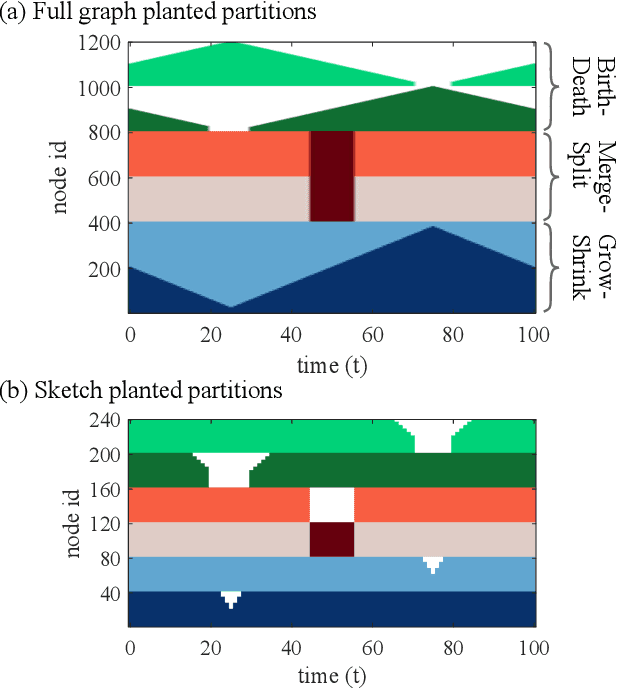
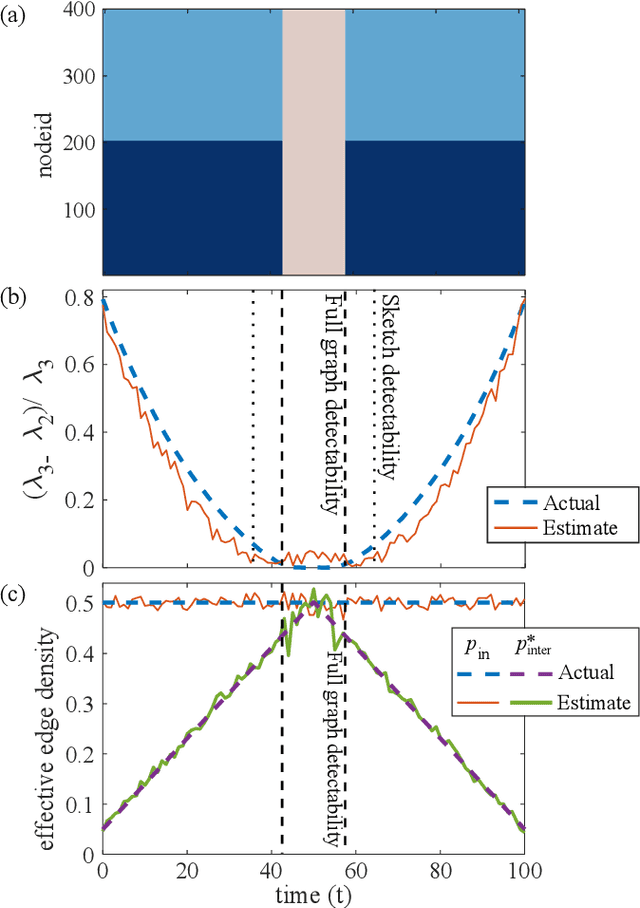
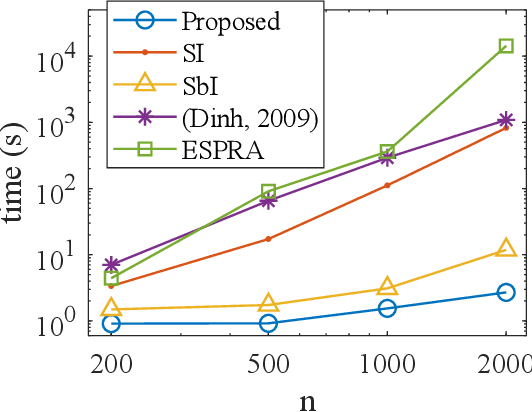
We consider an approach for community detection in time-varying networks. At its core, this approach maintains a small sketch graph to capture the essential community structure found in each snapshot of the full network. We demonstrate how the sketch can be used to explicitly identify six key community events which typically occur during network evolution: growth, shrinkage, merging, splitting, birth and death. Based on these detection techniques, we formulate a community detection algorithm which can process a network concurrently exhibiting all processes. One advantage afforded by the sketch-based algorithm is the efficient handling of large networks. Whereas detecting events in the full graph may be computationally expensive, the small size of the sketch allows changes to be quickly assessed. A second advantage occurs in networks containing clusters of disproportionate size. The sketch is constructed such that there is equal representation of each cluster, thus reducing the possibility that the small clusters are lost in the estimate. We present a new standardized benchmark based on the stochastic block model which models the addition and deletion of nodes, as well as the birth and death of communities. When coupled with existing benchmarks, this new benchmark provides a comprehensive suite of tests encompassing all six community events. We provide a set of numerical results demonstrating the advantages of our approach both in run time and in the handling of small clusters.
Replacing Human Audio with Synthetic Audio for On-device Unspoken Punctuation Prediction
Oct 20, 2020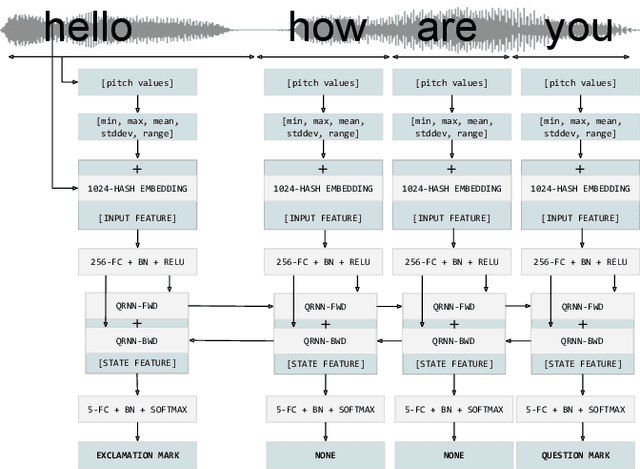

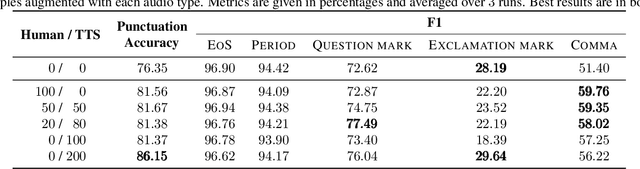

We present a novel multi-modal unspoken punctuation prediction system for the English language which combines acoustic and text features. We demonstrate for the first time, that by relying exclusively on synthetic data generated using a prosody-aware text-to-speech system, we can outperform a model trained with expensive human audio recordings on the unspoken punctuation prediction problem. Our model architecture is well suited for on-device use. This is achieved by leveraging hash-based embeddings of automatic speech recognition text output in conjunction with acoustic features as input to a quasi-recurrent neural network, keeping the model size small and latency low.
Bridging the Gap between Optimal Trajectory Planning and Safety-Critical Control with Applications to Autonomous Vehicles
Aug 17, 2020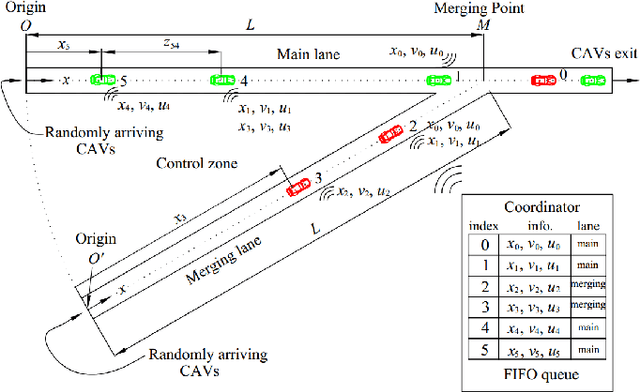
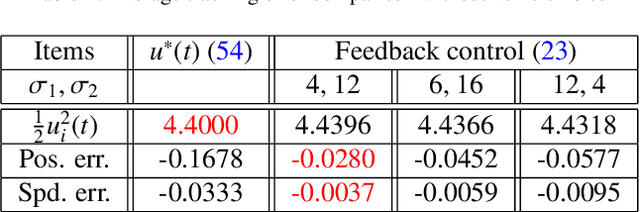

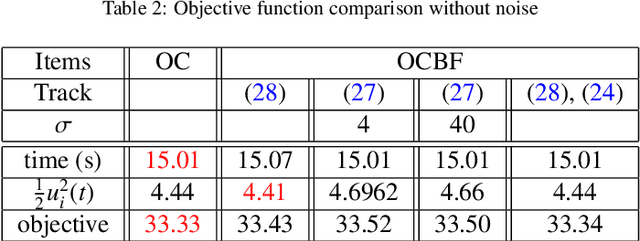
We address the problem of optimizing the performance of a dynamic system while satisfying hard safety constraints at all times. Implementing an optimal control solution is limited by the computational cost required to derive it in real time, especially when constraints become active, as well as the need to rely on simple linear dynamics, simple objective functions, and ignoring noise. The recently proposed Control Barrier Function (CBF) method may be used for safety-critical control at the expense of sub-optimal performance. In this paper, we develop a real-time control framework that combines optimal trajectories generated through optimal control with the computationally efficient CBF method providing safety guarantees. We use Hamiltonian analysis to obtain a tractable optimal solution for a linear or linearized system, then employ High Order CBFs (HOCBFs) and Control Lyapunov Functions (CLFs) to account for constraints with arbitrary relative degrees and to track the optimal state, respectively. We further show how to deal with noise in arbitrary relative degree systems. The proposed framework is then applied to the optimal traffic merging problem for Connected and Automated Vehicles (CAVs) where the objective is to jointly minimize the travel time and energy consumption of each CAV subject to speed, acceleration, and speed-dependent safety constraints. In addition, when considering more complex objective functions, nonlinear dynamics and passenger comfort requirements for which analytical optimal control solutions are unavailable, we adapt the HOCBF method to such problems. Simulation examples are included to compare the performance of the proposed framework to optimal solutions (when available) and to a baseline provided by human-driven vehicles with results showing significant improvements in all metrics.
Understood in Translation, Transformers for Domain Understanding
Dec 18, 2020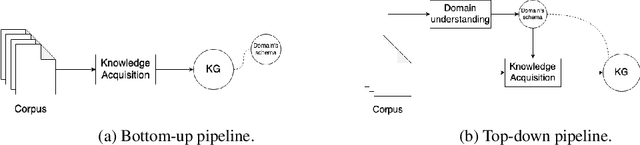


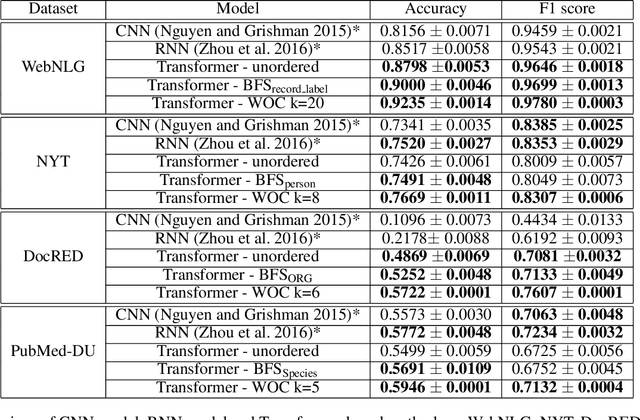
Knowledge acquisition is the essential first step of any Knowledge Graph (KG) application. This knowledge can be extracted from a given corpus (KG generation process) or specified from an existing KG (KG specification process). Focusing on domain specific solutions, knowledge acquisition is a labor intensive task usually orchestrated and supervised by subject matter experts. Specifically, the domain of interest is usually manually defined and then the needed generation or extraction tools are utilized to produce the KG. Herein, we propose a supervised machine learning method, based on Transformers, for domain definition of a corpus. We argue why such automated definition of the domain's structure is beneficial both in terms of construction time and quality of the generated graph. The proposed method is extensively validated on three public datasets (WebNLG, NYT and DocRED) by comparing it with two reference methods based on CNNs and RNNs models. The evaluation shows the efficiency of our model in this task. Focusing on scientific document understanding, we present a new health domain dataset based on publications extracted from PubMed and we successfully utilize our method on this. Lastly, we demonstrate how this work lays the foundation for fully automated and unsupervised KG generation.
Householder Dice: A Matrix-Free Algorithm for Simulating Dynamics on Gaussian and Random Orthogonal Ensembles
Jan 19, 2021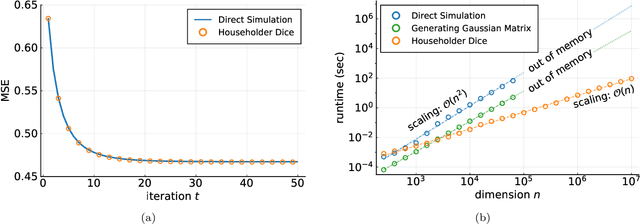
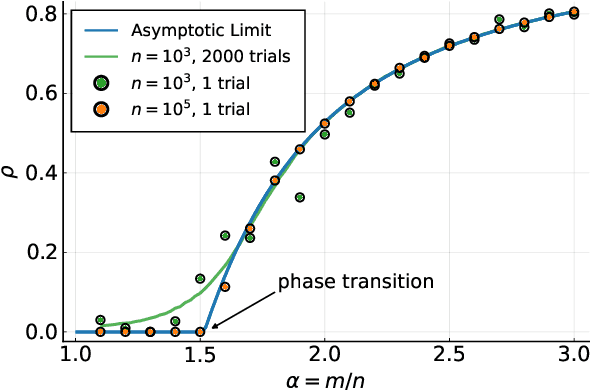
In the study of large random systems, researchers often need to simulate dynamics in the form of iterated matrix-vector multiplications interspersed with nonlinear operations. Examples include message passing algorithms, gradient descent, and matrix iterative methods for extremal eigenvalue calculations. This paper proposes a new algorithm, named Householder Dice (HD), for simulating such dynamics on several random matrix ensembles with translation-invariant properties. Examples include the Gaussian ensemble, the Haar-distributed random orthogonal ensemble, and their complex-valued counterparts. A "direct" approach to the simulation, where one first generates a dense $n \times n$ matrix from the ensemble, requires at least $\mathcal{O}(n^2)$ resource in space and time. The HD algorithm overcomes this $\mathcal{O}(n^2)$ bottleneck by using the principle of deferred decisions: rather than fixing the entire random matrix in advance, it lets the randomness unfold with the dynamics. Key to this matrix-free construction is an adaptive and recursive construction of (random) Householder reflectors. These orthogonal transformations exploit the group symmetry of the matrix ensembles, while simultaneously maintaining the statistical correlations induced by the dynamics. The memory and computation costs of the HD algorithm are $\mathcal{O}(nT)$ and $\mathcal{O}(nT^2)$, respectively, with $T$ being the number of iterations. When $T \ll n$, which is nearly always the case in practice, the HD algorithm leads to significant reductions in runtime and memory footprint. Numerical results demonstrate the promise of the new algorithm as a new computational tool in the study of high-dimensional random systems.
Efficiently Combining Human Demonstrations and Interventions for Safe Training of Autonomous Systems in Real-Time
Oct 26, 2018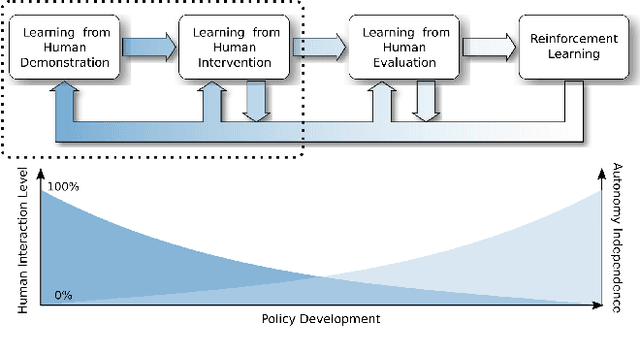
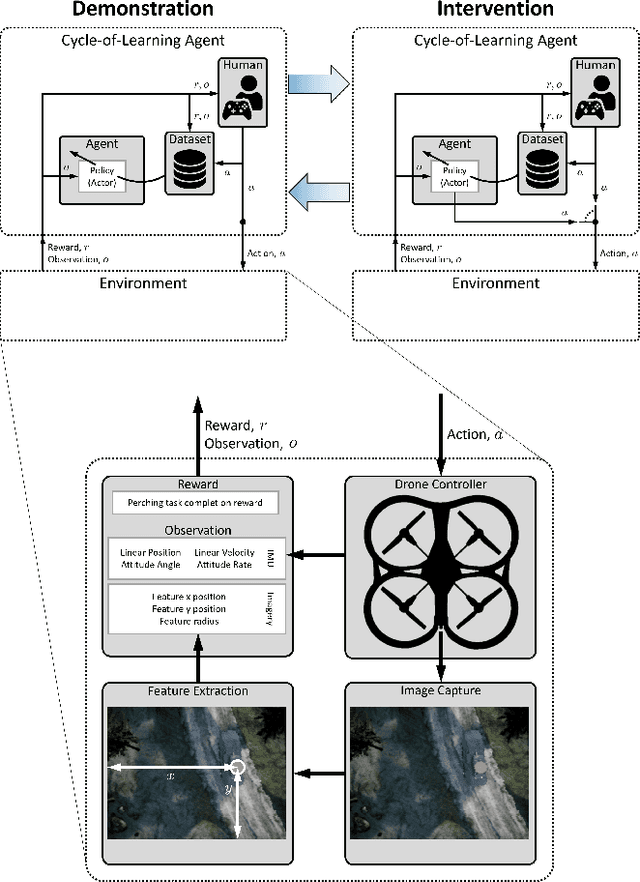
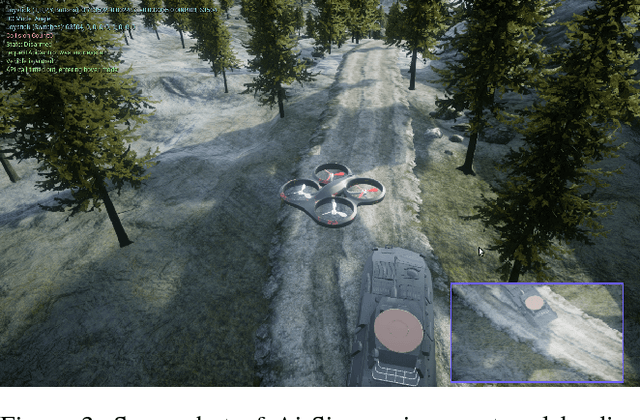
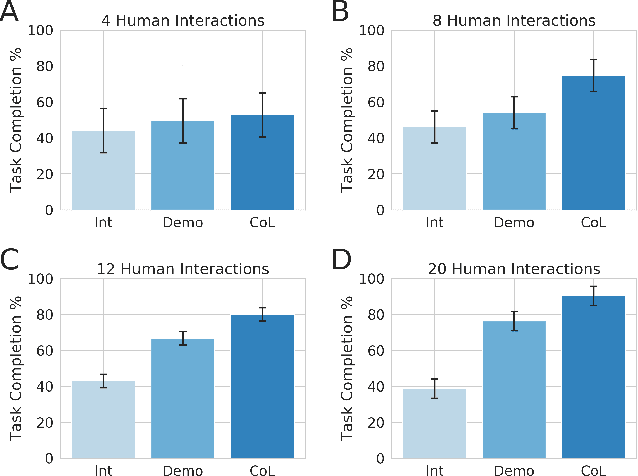
This paper investigates how to utilize different forms of human interaction to safely train autonomous systems in real-time by learning from both human demonstrations and interventions. We implement two components of the Cycle-of-Learning for Autonomous Systems, which is our framework for combining multiple modalities of human interaction. The current effort employs human demonstrations to teach a desired behavior via imitation learning, then leverages intervention data to correct for undesired behaviors produced by the imitation learner to teach novel tasks to an autonomous agent safely, after only minutes of training. We demonstrate this method in an autonomous perching task using a quadrotor with continuous roll, pitch, yaw, and throttle commands and imagery captured from a downward-facing camera in a high-fidelity simulated environment. Our method improves task completion performance for the same amount of human interaction when compared to learning from demonstrations alone, while also requiring on average 32% less data to achieve that performance. This provides evidence that combining multiple modes of human interaction can increase both the training speed and overall performance of policies for autonomous systems.
Dynamic Bicycle Dispatching of Dockless Public Bicycle-sharing Systems using Multi-objective Reinforcement Learning
Jan 19, 2021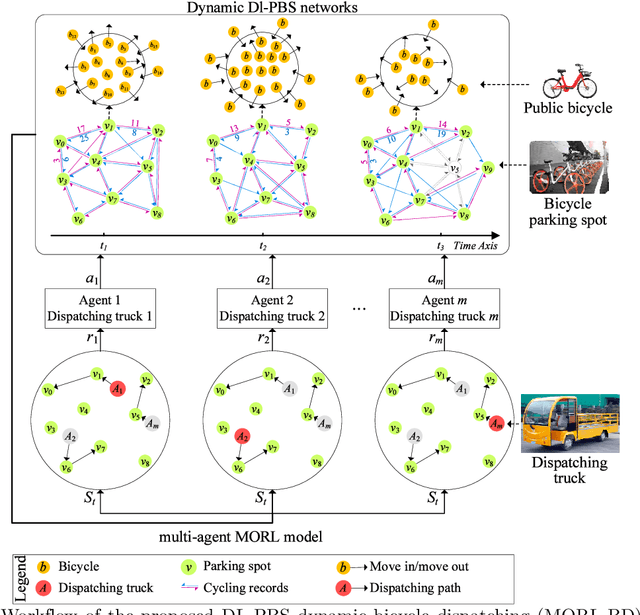
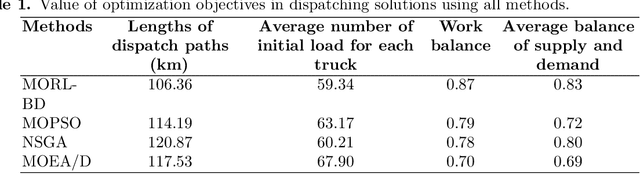
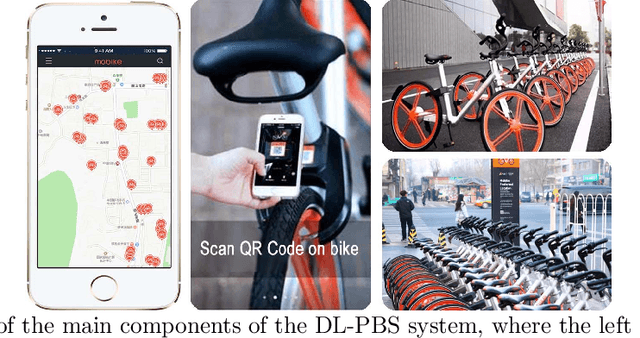
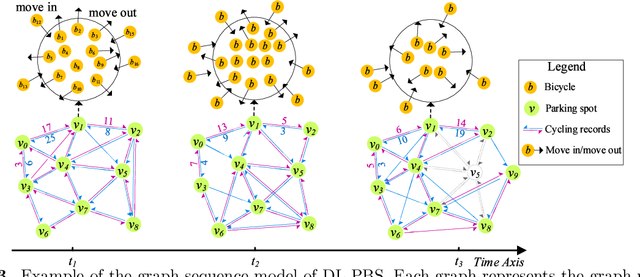
As a new generation of Public Bicycle-sharing Systems (PBS), the dockless PBS (DL-PBS) is an important application of cyber-physical systems and intelligent transportation. How to use AI to provide efficient bicycle dispatching solutions based on dynamic bicycle rental demand is an essential issue for DL-PBS. In this paper, we propose a dynamic bicycle dispatching algorithm based on multi-objective reinforcement learning (MORL-BD) to provide the optimal bicycle dispatching solution for DL-PBS. We model the DL-PBS system from the perspective of CPS and use deep learning to predict the layout of bicycle parking spots and the dynamic demand of bicycle dispatching. We define the multi-route bicycle dispatching problem as a multi-objective optimization problem by considering the optimization objectives of dispatching costs, dispatch truck's initial load, workload balance among the trucks, and the dynamic balance of bicycle supply and demand. On this basis, the collaborative multi-route bicycle dispatching problem among multiple dispatch trucks is modeled as a multi-agent MORL model. All dispatch paths between parking spots are defined as state spaces, and the reciprocal of dispatching costs is defined as a reward. Each dispatch truck is equipped with an agent to learn the optimal dispatch path in the dynamic DL-PBS network. We create an elite list to store the Pareto optimal solutions of bicycle dispatch paths found in each action, and finally, get the Pareto frontier. Experimental results on the actual DL-PBS systems show that compared with existing methods, MORL-BD can find a higher quality Pareto frontier with less execution time.
Classification and Segmentation of Pulmonary Lesions in CT images using a combined VGG-XGBoost method, and an integrated Fuzzy Clustering-Level Set technique
Jan 04, 2021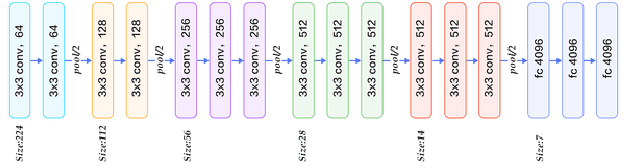
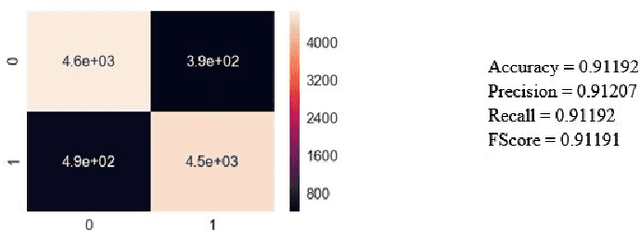
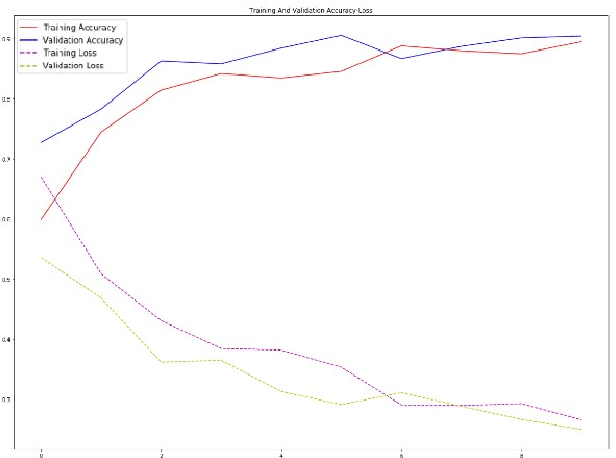
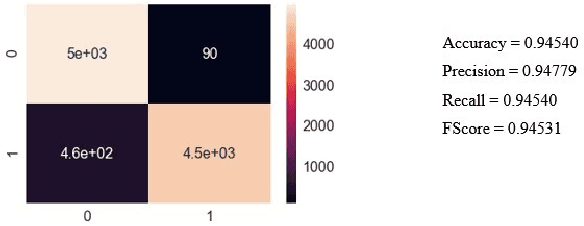
Given that lung cancer is one of the deadliest diseases, and many die from the disease every year, early detection and diagnosis of this disease are valuable, preventing cancer from growing and spreading. So if cancer is diagnosed in the early stage, the patient's life will be saved. However, the current pulmonary disease diagnosis is made by human resources, which is time-consuming and requires a specialist in this field. Also, there is a high level of errors in human diagnosis. Our goal is to develop a system that can detect and classify lung lesions with high accuracy and segment them in CT-scan images. In the proposed method, first, features are extracted automatically from the CT-scan image; then, the extracted features are classified by Ensemble Gradient Boosting methods. Finally, if there is a lesion in the CT-scan image, using a hybrid method based on [1], including Fuzzy Clustering and Level Set, the lesion is segmented. We collected a dataset, including CT-scan images of pulmonary lesions. The target community was the patients in Mashhad. The collected samples were then tagged by a specialist. We used this dataset for training and testing our models. Finally, we were able to achieve an accuracy of 96% for this dataset. This system can help physicians to diagnose pulmonary lesions and prevent possible mistakes.