 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
WheatNet: A Lightweight Convolutional Neural Network for High-throughput Image-based Wheat Head Detection and Counting
Mar 17, 2021

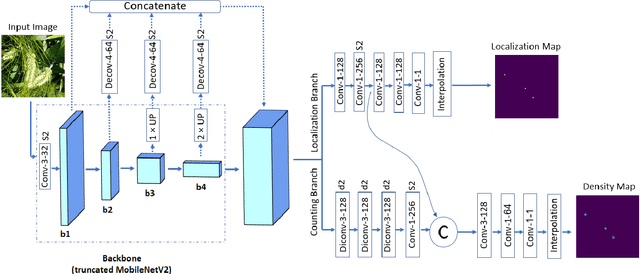
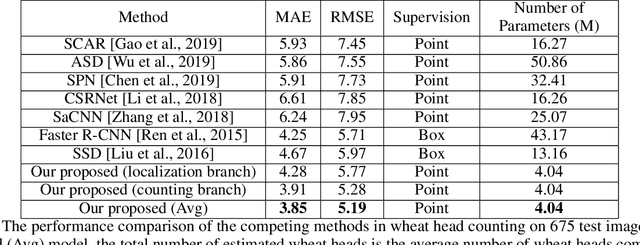
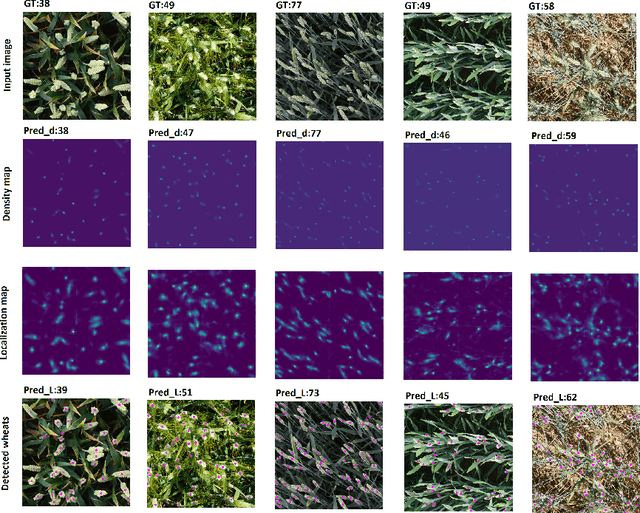
For a globally recognized planting breeding organization, manually-recorded field observation data is crucial for plant breeding decision making. However, certain phenotypic traits such as plant color, height, kernel counts, etc. can only be collected during a specific time-window of a crop's growth cycle. Due to labor-intensive requirements, only a small subset of possible field observations are recorded each season. To help mitigate this data collection bottleneck in wheat breeding, we propose a novel deep learning framework to accurately and efficiently count wheat heads to aid in the gathering of real-time data for decision making. We call our model WheatNet and show that our approach is robust and accurate for a wide range of environmental conditions of the wheat field. WheatNet uses a truncated MobileNetV2 as a lightweight backbone feature extractor which merges feature maps with different scales to counter image scale variations. Then, extracted multi-scale features go to two parallel sub-networks for simultaneous density-based counting and localization tasks. Our proposed method achieves an MAE and RMSE of 3.85 and 5.19 in our wheat head counting task, respectively, while having significantly fewer parameters when compared to other state-of-the-art methods. Our experiments and comparisons with other state-of-the-art methods demonstrate the superiority and effectiveness of our proposed method.
Hone as You Read: A Practical Type of Interactive Summarization
May 06, 2021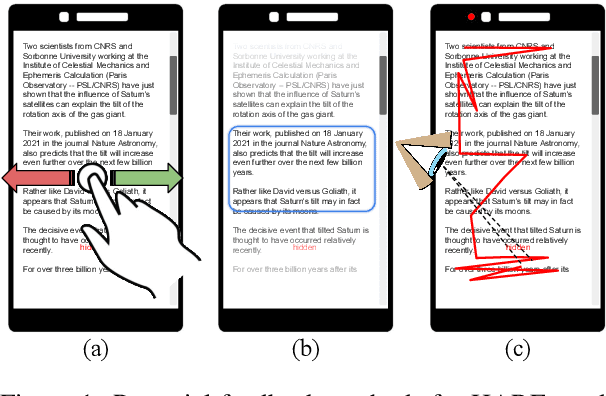
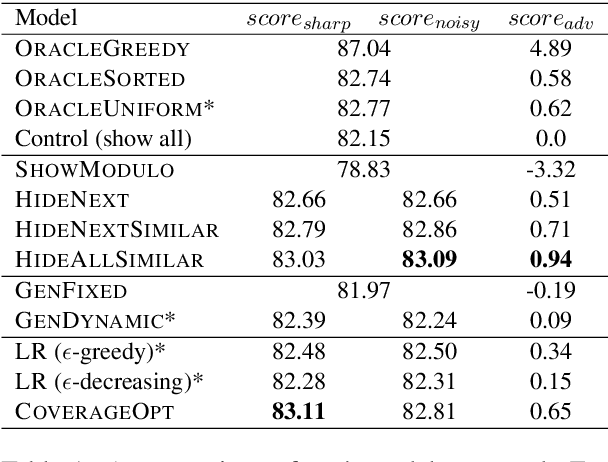
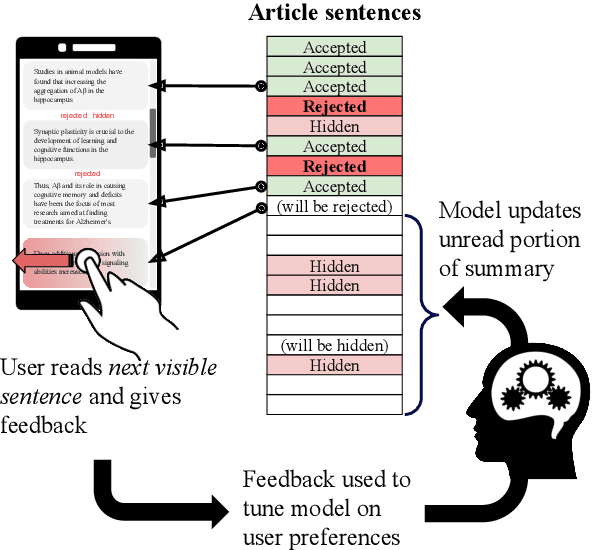
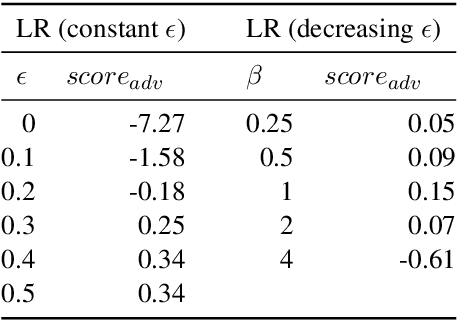
We present HARE, a new task where reader feedback is used to optimize document summaries for personal interest during the normal flow of reading. This task is related to interactive summarization, where personalized summaries are produced following a long feedback stage where users may read the same sentences many times. However, this process severely interrupts the flow of reading, making it impractical for leisurely reading. We propose to gather minimally-invasive feedback during the reading process to adapt to user interests and augment the document in real-time. Building off of recent advances in unsupervised summarization evaluation, we propose a suitable metric for this task and use it to evaluate a variety of approaches. Our approaches range from simple heuristics to preference-learning and their analysis provides insight into this important task. Human evaluation additionally supports the practicality of HARE. The code to reproduce this work is available at https://github.com/tannerbohn/HoneAsYouRead.
Convolutional Neural Networks for Sleep Stage Scoring on a Two-Channel EEG Signal
Mar 30, 2021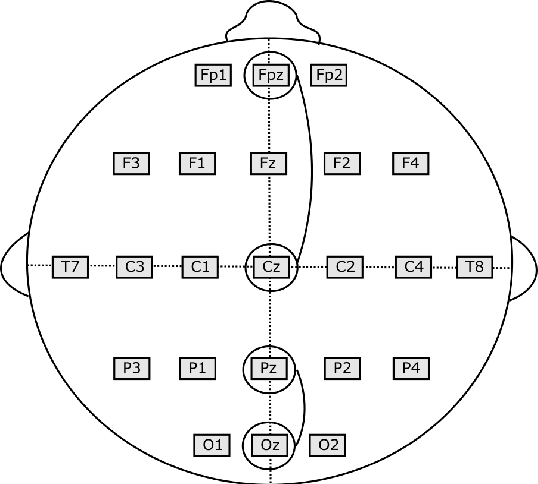

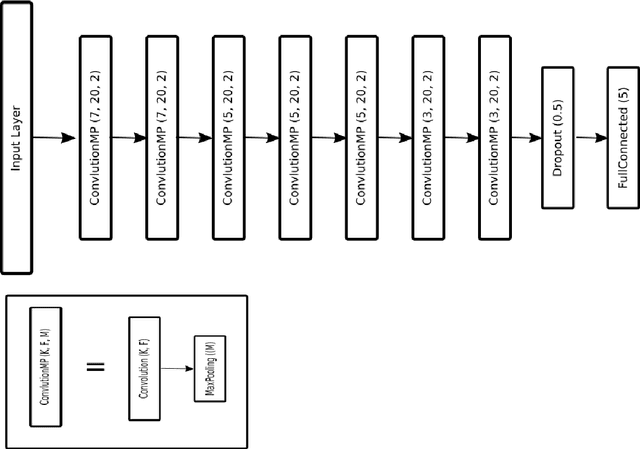
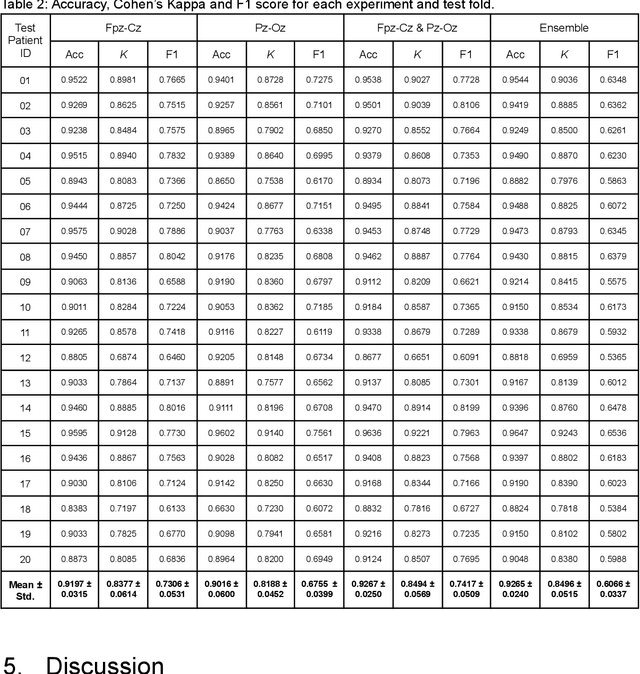
Sleeping problems have become one of the major diseases all over the world. To tackle this issue, the basic tool used by specialists is the Polysomnogram, which is a collection of different signals recorded during sleep. After its recording, the specialists have to score the different signals according to one of the standard guidelines. This process is carried out manually, which can be highly time-consuming and very prone to annotation errors. Therefore, over the years, many approaches have been explored in an attempt to support the specialists in this task. In this paper, an approach based on convolutional neural networks is presented, where an in-depth comparison is performed in order to determine the convenience of using more than one signal simultaneously as input. Additionally, the models were also used as parts of an ensemble model to check whether any useful information can be extracted from signal processing a single signal at a time which the dual-signal model cannot identify. Tests have been performed by using a well-known dataset called expanded sleep-EDF, which is the most commonly used dataset as the benchmark for this problem. The tests were carried out with a leave-one-out cross-validation over the patients, which ensures that there is no possible contamination between training and testing. The resulting proposal is a network smaller than previously published ones, but which overcomes the results of any previous models on the same dataset. The best result shows an accuracy of 92.67\% and a Cohen's Kappa value over 0.84 compared to human experts.
* 20 pages, 4 figures, 4 tables
Towards 3D Metric GPR Imaging Based on DNN Noise Removal and Dielectric Estimation
May 15, 2021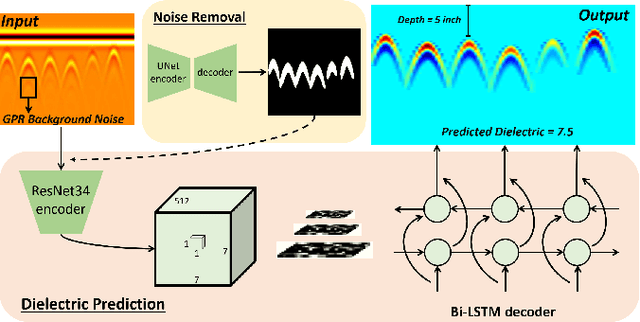
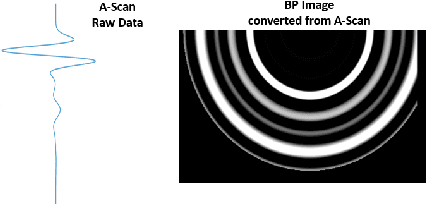
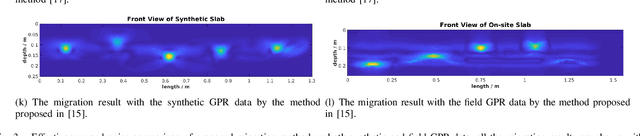
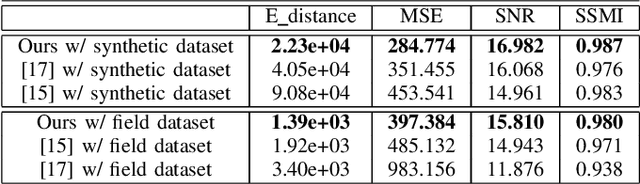
Ground Penetrating Radar (GPR) is one of the most important non-destructive evaluation (NDE) devices to detect subsurface objects (i.e., rebars, utility pipes) and reveal the underground scene. The two biggest challenges in GPR-based inspection are the GPR data collection and subsurface target imaging. To address these challenges, we propose a robotic solution that automates the GPR data collection process with a free motion pattern. It facilitates the 3D metric GPR imaging by tagging the pose information with GPR measurement in real-time. We also introduce a deep neural network (DNN) based GPR data analysis method which includes a noise removal segmentation module to clear the noise in GPR raw data and a DielectricNet to estimate the dielectric value of subsurface media in each GPR B-scan data. We use both the field and synthetic data to verify the proposed method. Experimental results demonstrate that our proposed method can achieve better performance and faster processing speed in GPR data collection and 3D GPR imaging than other methods.
* under review
Exploring Classic and Neural Lexical Translation Models for Information Retrieval: Interpretability, Effectiveness, and Efficiency Benefits
Feb 12, 2021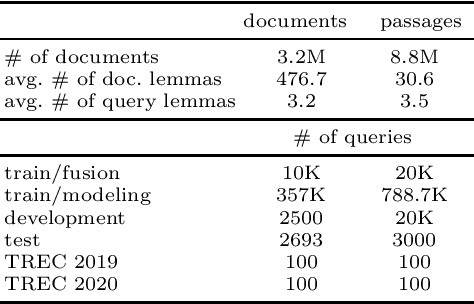

We study the utility of the lexical translation model (IBM Model 1) for English text retrieval, in particular, its neural variants that are trained end-to-end. We use the neural Model1 as an aggregator layer applied to context-free or contextualized query/document embeddings. This new approach to design a neural ranking system has benefits for effectiveness, efficiency, and interpretability. Specifically, we show that adding an interpretable neural Model 1 layer on top of BERT-based contextualized embeddings (1) does not decrease accuracy and/or efficiency; and (2) may overcome the limitation on the maximum sequence length of existing BERT models. The context-free neural Model 1 is less effective than a BERT-based ranking model, but it can run efficiently on a CPU (without expensive index-time precomputation or query-time operations on large tensors). Using Model 1 we produced best neural and non-neural runs on the MS MARCO document ranking leaderboard in late 2020.
The MineRL BASALT Competition on Learning from Human Feedback
Jul 05, 2021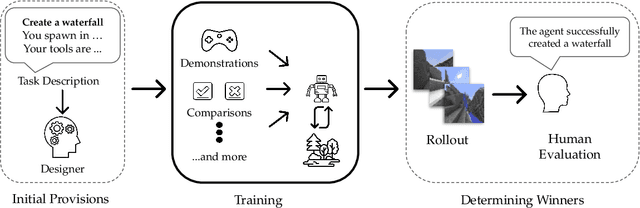
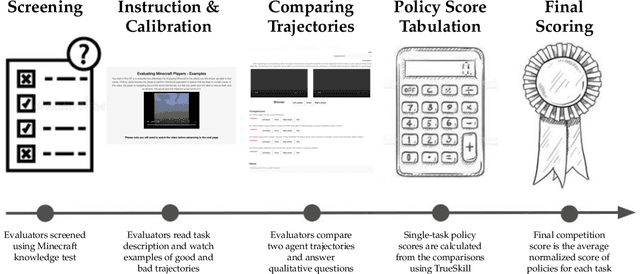
The last decade has seen a significant increase of interest in deep learning research, with many public successes that have demonstrated its potential. As such, these systems are now being incorporated into commercial products. With this comes an additional challenge: how can we build AI systems that solve tasks where there is not a crisp, well-defined specification? While multiple solutions have been proposed, in this competition we focus on one in particular: learning from human feedback. Rather than training AI systems using a predefined reward function or using a labeled dataset with a predefined set of categories, we instead train the AI system using a learning signal derived from some form of human feedback, which can evolve over time as the understanding of the task changes, or as the capabilities of the AI system improve. The MineRL BASALT competition aims to spur forward research on this important class of techniques. We design a suite of four tasks in Minecraft for which we expect it will be hard to write down hardcoded reward functions. These tasks are defined by a paragraph of natural language: for example, "create a waterfall and take a scenic picture of it", with additional clarifying details. Participants must train a separate agent for each task, using any method they want. Agents are then evaluated by humans who have read the task description. To help participants get started, we provide a dataset of human demonstrations on each of the four tasks, as well as an imitation learning baseline that leverages these demonstrations. Our hope is that this competition will improve our ability to build AI systems that do what their designers intend them to do, even when the intent cannot be easily formalized. Besides allowing AI to solve more tasks, this can also enable more effective regulation of AI systems, as well as making progress on the value alignment problem.
An attention model to analyse the risk of agitation and urinary tract infections in people with dementia
Jan 18, 2021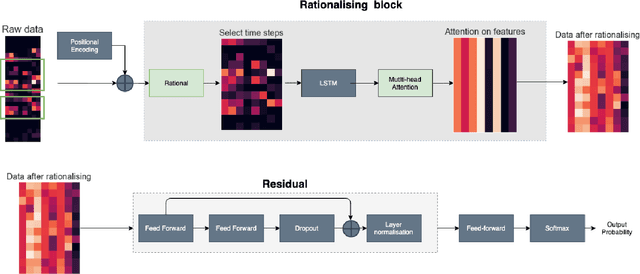
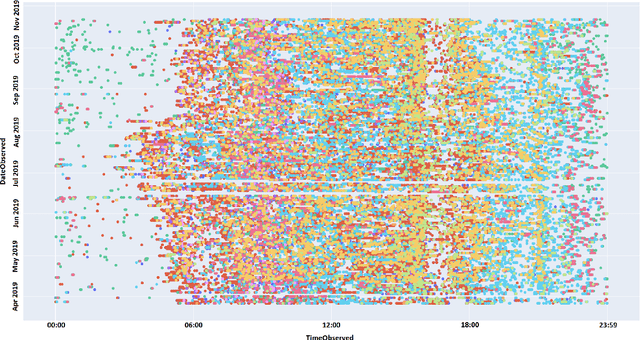
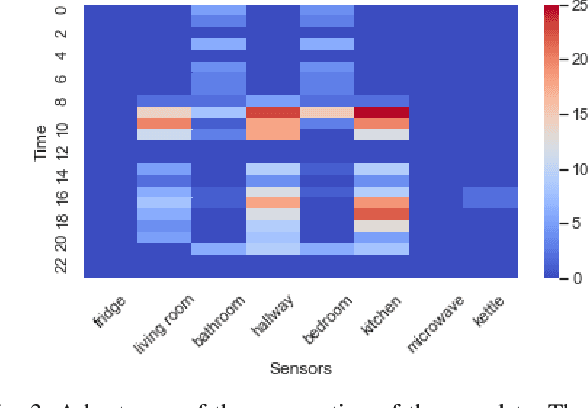
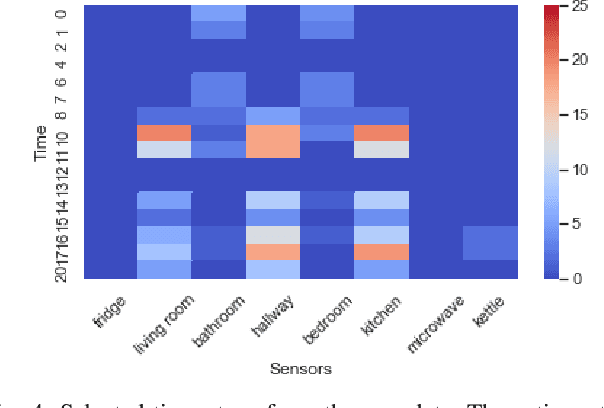
Behavioural symptoms and urinary tract infections (UTI) are among the most common problems faced by people with dementia. One of the key challenges in the management of these conditions is early detection and timely intervention in order to reduce distress and avoid unplanned hospital admissions. Using in-home sensing technologies and machine learning models for sensor data integration and analysis provides opportunities to detect and predict clinically significant events and changes in health status. We have developed an integrated platform to collect in-home sensor data and performed an observational study to apply machine learning models for agitation and UTI risk analysis. We collected a large dataset from 88 participants with a mean age of 82 and a standard deviation of 6.5 (47 females and 41 males) to evaluate a new deep learning model that utilises attention and rational mechanism. The proposed solution can process a large volume of data over a period of time and extract significant patterns in a time-series data (i.e. attention) and use the extracted features and patterns to train risk analysis models (i.e. rational). The proposed model can explain the predictions by indicating which time-steps and features are used in a long series of time-series data. The model provides a recall of 91\% and precision of 83\% in detecting the risk of agitation and UTIs. This model can be used for early detection of conditions such as UTIs and managing of neuropsychiatric symptoms such as agitation in association with initial treatment and early intervention approaches. In our study we have developed a set of clinical pathways for early interventions using the alerts generated by the proposed model and a clinical monitoring team has been set up to use the platform and respond to the alerts according to the created intervention plans.
Discovery of slow variables in a class of multiscale stochastic systems via neural networks
May 06, 2021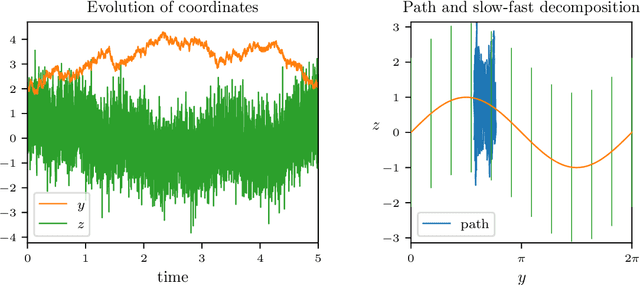
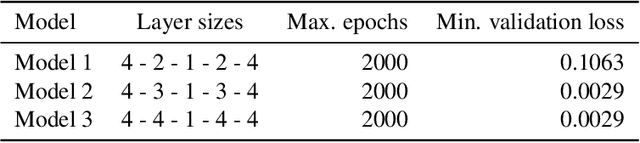
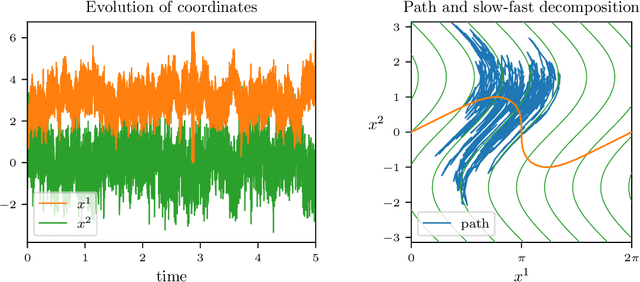
Finding a reduction of complex, high-dimensional dynamics to its essential, low-dimensional "heart" remains a challenging yet necessary prerequisite for designing efficient numerical approaches. Machine learning methods have the potential to provide a general framework to automatically discover such representations. In this paper, we consider multiscale stochastic systems with local slow-fast time scale separation and propose a new method to encode in an artificial neural network a map that extracts the slow representation from the system. The architecture of the network consists of an encoder-decoder pair that we train in a supervised manner to learn the appropriate low-dimensional embedding in the bottleneck layer. We test the method on a number of examples that illustrate the ability to discover a correct slow representation. Moreover, we provide an error measure to assess the quality of the embedding and demonstrate that pruning the network can pinpoint an essential coordinates of the system to build the slow representation.
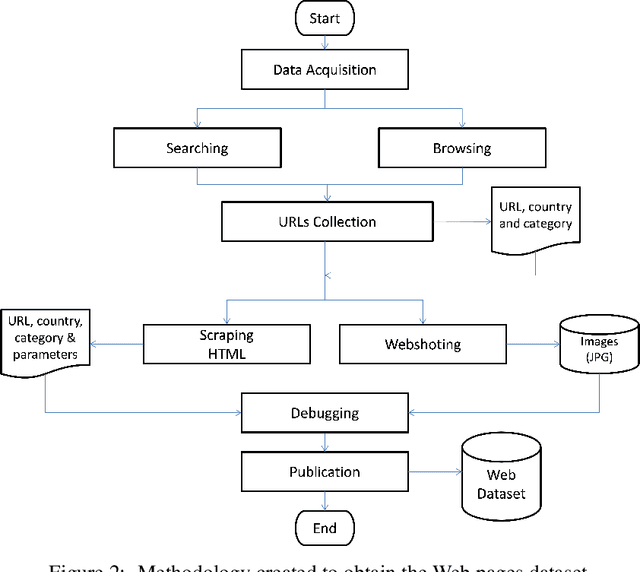
A Large Visual, Qualitative and Quantitative Dataset of Web Pages
May 15, 2021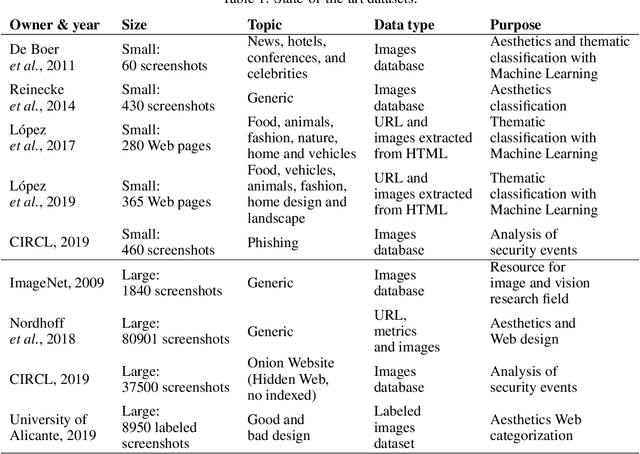
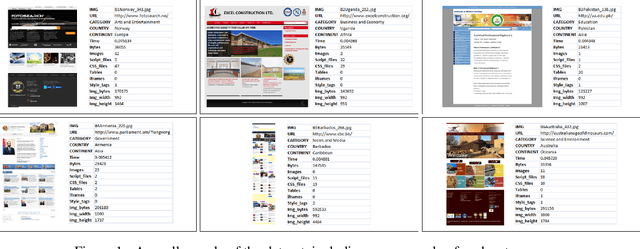
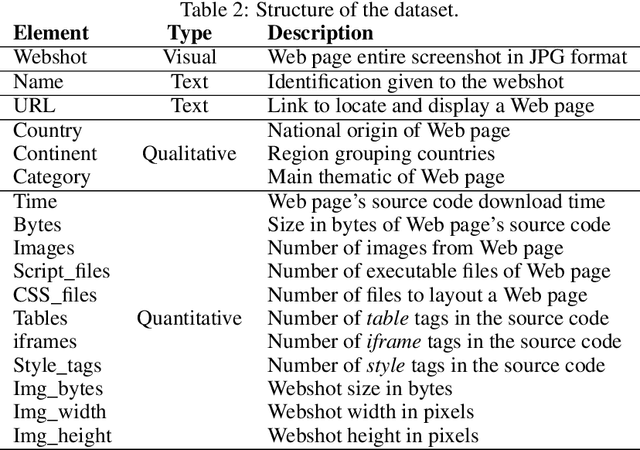
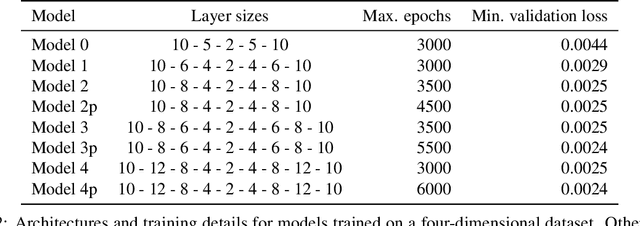
The World Wide Web is not only one of the most important platforms of communication and information at present, but also an area of growing interest for scientific research. This motivates a lot of work and projects that require large amounts of data. However, there is no dataset that integrates the parameters and visual appearance of Web pages, because its collection is a costly task in terms of time and effort. With the support of various computer tools and programming scripts, we have created a large dataset of 49,438 Web pages. It consists of visual, textual and numerical data types, includes all countries worldwide, and considers a broad range of topics such as art, entertainment, economy, business, education, government, news, media, science, and environment, covering different cultural characteristics and varied design preferences. In this paper, we describe the process of collecting, debugging and publishing the final product, which is freely available. To demonstrate the usefulness of our dataset, we expose a binary classification model for detecting error Web pages, and a multi-class Web subject-based categorization, both problems using convolutional neural networks.
Trajectory Optimization of Chance-Constrained Nonlinear Stochastic Systems for Motion Planning and Control
Jun 05, 2021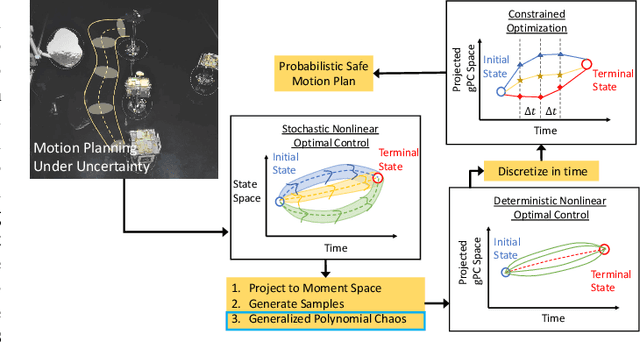
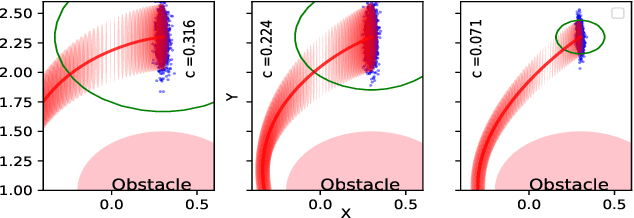

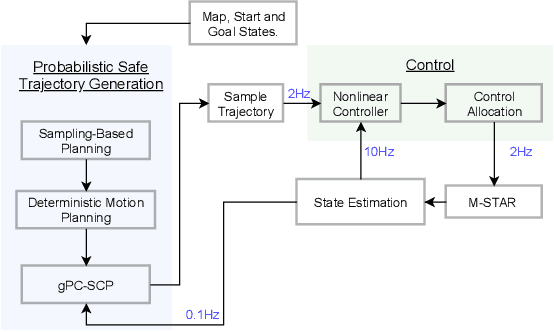
We present gPC-SCP: Generalized Polynomial Chaos-based Sequential Convex Programming method to compute a sub-optimal solution for a continuous-time chance-constrained stochastic nonlinear optimal control problem (SNOC) problem. The approach enables motion planning and control of robotic systems under uncertainty. The proposed method involves two steps. The first step is to derive a deterministic nonlinear optimal control problem (DNOC) with convex constraints that are surrogate to the SNOC by using gPC expansion and the distributionally-robust convex subset of the chance constraints. The second step is to solve the DNOC problem using sequential convex programming (SCP) for trajectory generation and control. We prove that in the unconstrained case, the optimal value of the DNOC converges to that of SNOC asymptotically and that any feasible solution of the constrained DNOC is a feasible solution of the chance-constrained SNOC. We derive a stable stochastic model predictive controller using the gPC-SCP for tracking a trajectory in the presence of uncertainty. We empirically demonstrate the efficacy of the gPC-SCP method for the following three test cases: 1) collision checking under uncertainty in actuation, 2) collision checking with stochastic obstacle model, and 3) safe trajectory tracking under uncertainty in the dynamics and obstacle location by using a receding horizon control approach. We validate the effectiveness of the gPC-SCP method on the robotic spacecraft testbed.