 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Traffic Flows Analysis in High-Speed Computer Networks Using Time Series
Mar 05, 2021
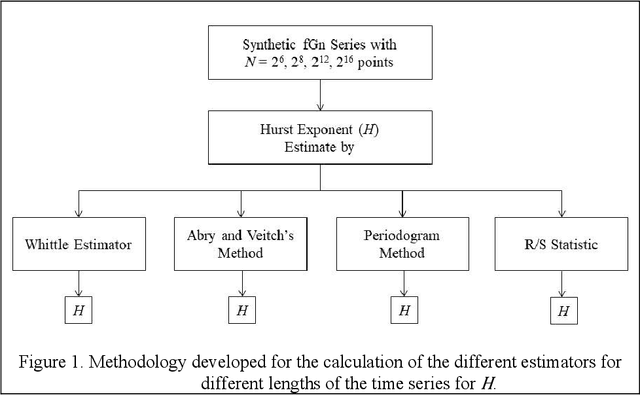

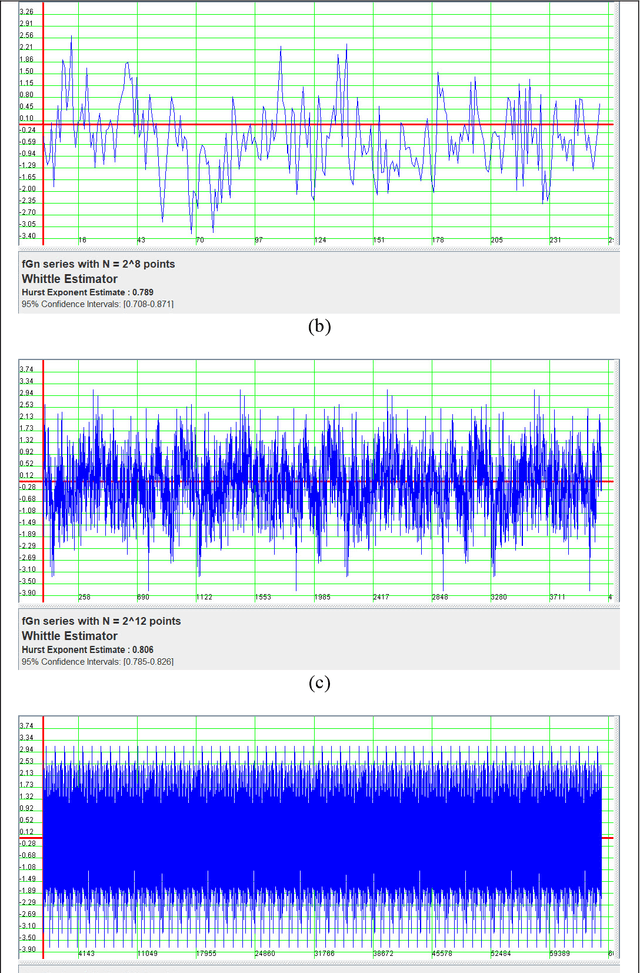

This article explores the required amount of time series points from a high-speed traffic network to accurately estimate the Hurst exponent. The methodology consists in designing an experiment using estimators that are applied to time series, followed by addressing the minimum amount of points required to obtain accurate estimates of the Hurst exponent in real-time. The methodology addresses the exhaustive analysis of the Hurst exponent considering bias behavior, standard deviation, mean square error, and convergence using fractional gaussian noise signals with stationary increases. Our results show that the Whittle estimator successfully estimates the Hurst exponent in series with few points. Based on the results obtained, a minimum length for the time series is empirically proposed. Finally, to validate the results, the methodology is applied to real traffic captures in a high-speed network based on the IEEE 802.3ab standard.
Collaborative Linear Bandits with Adversarial Agents: Near-Optimal Regret Bounds
Jun 06, 2022
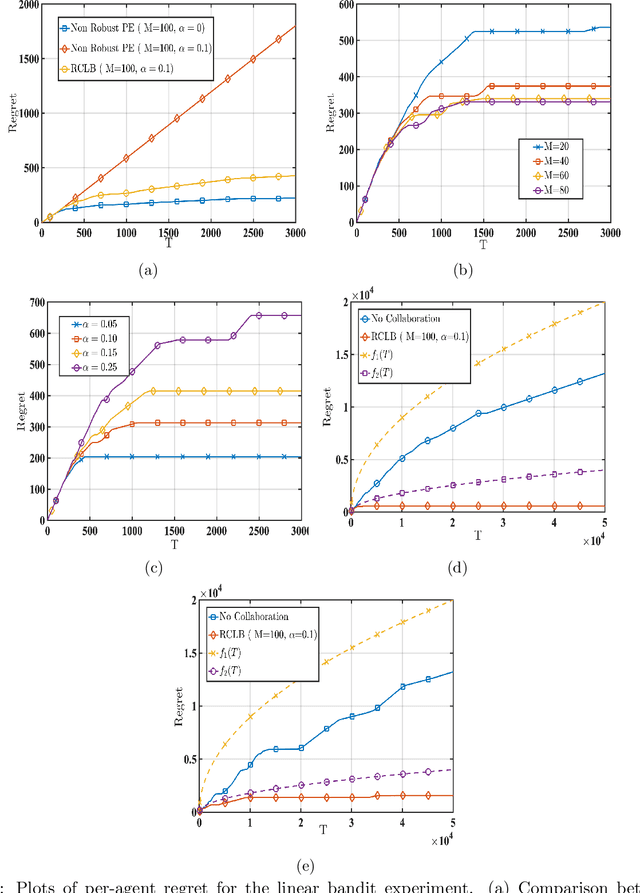
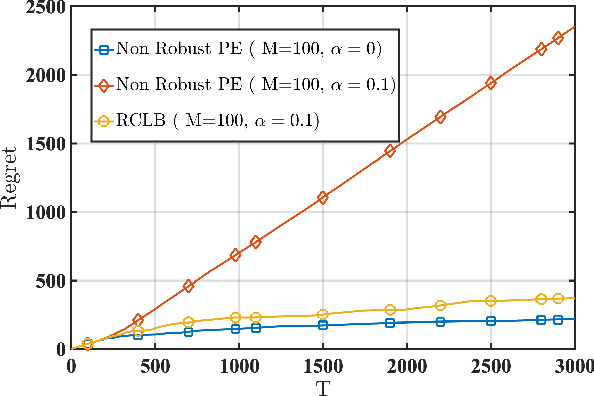
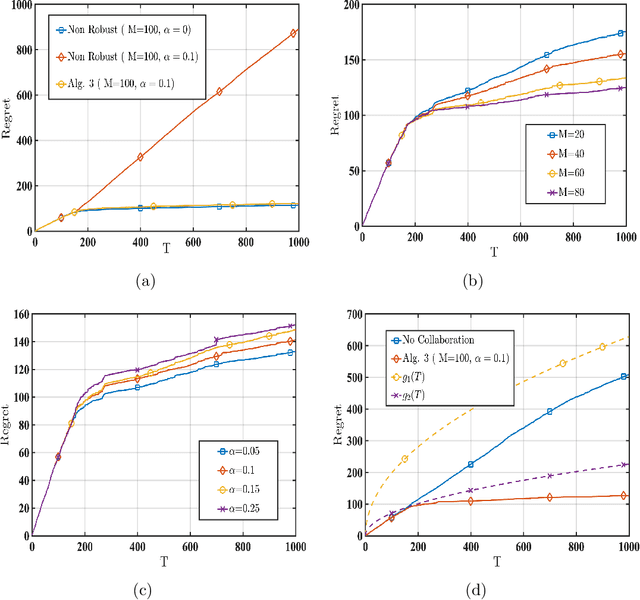
We consider a linear stochastic bandit problem involving $M$ agents that can collaborate via a central server to minimize regret. A fraction $\alpha$ of these agents are adversarial and can act arbitrarily, leading to the following tension: while collaboration can potentially reduce regret, it can also disrupt the process of learning due to adversaries. In this work, we provide a fundamental understanding of this tension by designing new algorithms that balance the exploration-exploitation trade-off via carefully constructed robust confidence intervals. We also complement our algorithms with tight analyses. First, we develop a robust collaborative phased elimination algorithm that achieves $\tilde{O}\left(\alpha+ 1/\sqrt{M}\right) \sqrt{dT}$ regret for each good agent; here, $d$ is the model-dimension and $T$ is the horizon. For small $\alpha$, our result thus reveals a clear benefit of collaboration despite adversaries. Using an information-theoretic argument, we then prove a matching lower bound, thereby providing the first set of tight, near-optimal regret bounds for collaborative linear bandits with adversaries. Furthermore, by leveraging recent advances in high-dimensional robust statistics, we significantly extend our algorithmic ideas and results to (i) the generalized linear bandit model that allows for non-linear observation maps; and (ii) the contextual bandit setting that allows for time-varying feature vectors.
Blended Latent Diffusion
Jun 06, 2022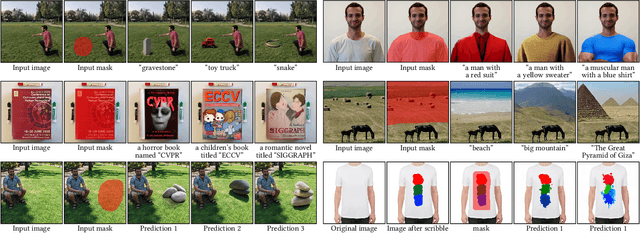
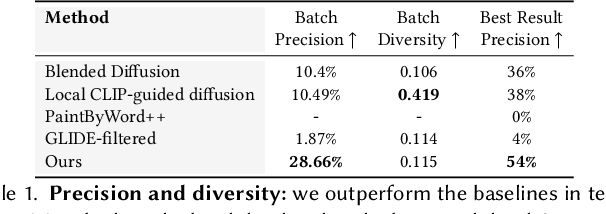
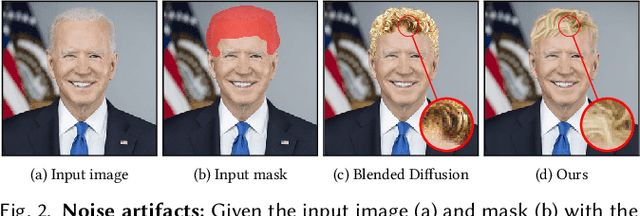
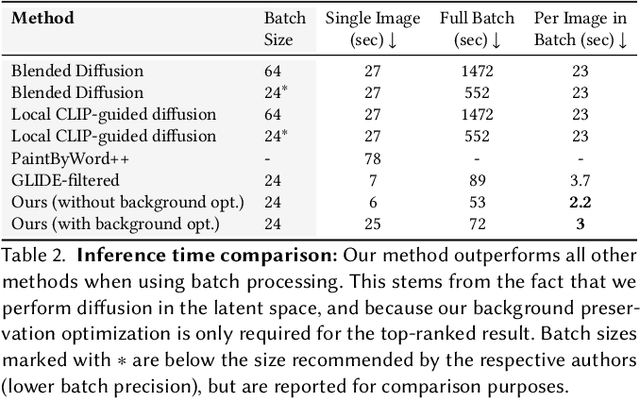
The tremendous progress in neural image generation, coupled with the emergence of seemingly omnipotent vision-language models has finally enabled text-based interfaces for creating and editing images. Handling generic images requires a diverse underlying generative model, hence the latest works utilize diffusion models, which were shown to surpass GANs in terms of diversity. One major drawback of diffusion models, however, is their relatively slow inference time. In this paper, we present an accelerated solution to the task of local text-driven editing of generic images, where the desired edits are confined to a user-provided mask. Our solution leverages a recent text-to-image Latent Diffusion Model (LDM), which speeds up diffusion by operating in a lower-dimensional latent space. We first convert the LDM into a local image editor by incorporating Blended Diffusion into it. Next we propose an optimization-based solution for the inherent inability of this LDM to accurately reconstruct images. Finally, we address the scenario of performing local edits using thin masks. We evaluate our method against the available baselines both qualitatively and quantitatively and demonstrate that in addition to being faster, our method achieves better precision than the baselines while mitigating some of their artifacts. Project page is available at https://omriavrahami.com/blended-latent-diffusion-page/
Theories of "Gender" in NLP Bias Research
May 05, 2022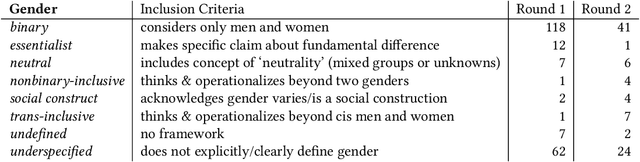
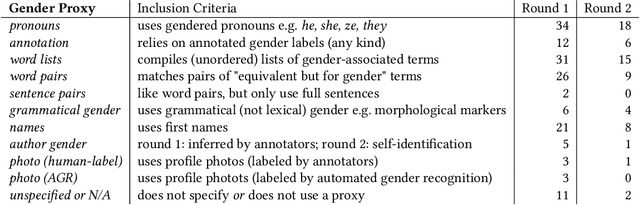
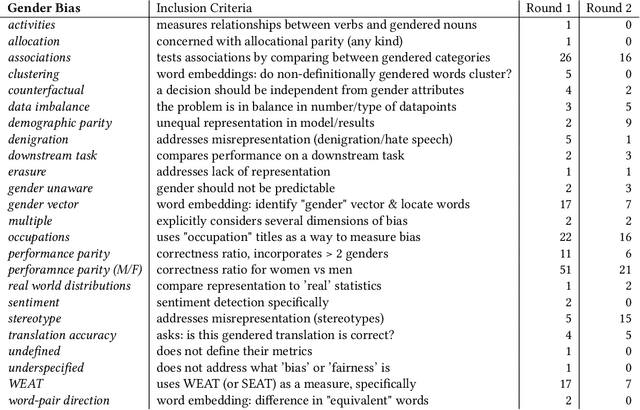
The rise of concern around Natural Language Processing (NLP) technologies containing and perpetuating social biases has led to a rich and rapidly growing area of research. Gender bias is one of the central biases being analyzed, but to date there is no comprehensive analysis of how "gender" is theorized in the field. We survey nearly 200 articles concerning gender bias in NLP to discover how the field conceptualizes gender both explicitly (e.g. through definitions of terms) and implicitly (e.g. through how gender is operationalized in practice). In order to get a better idea of emerging trajectories of thought, we split these articles into two sections by time. We find that the majority of the articles do not make their theorization of gender explicit, even if they clearly define "bias." Almost none use a model of gender that is intersectional or inclusive of nonbinary genders; and many conflate sex characteristics, social gender, and linguistic gender in ways that disregard the existence and experience of trans, nonbinary, and intersex people. There is an increase between the two time-sections in statements acknowledging that gender is a complicated reality, however, very few articles manage to put this acknowledgment into practice. In addition to analyzing these findings, we provide specific recommendations to facilitate interdisciplinary work, and to incorporate theory and methodology from Gender Studies. Our hope is that this will produce more inclusive gender bias research in NLP.
Unsupervised Difference Learning for Noisy Rigid Image Alignment
May 24, 2022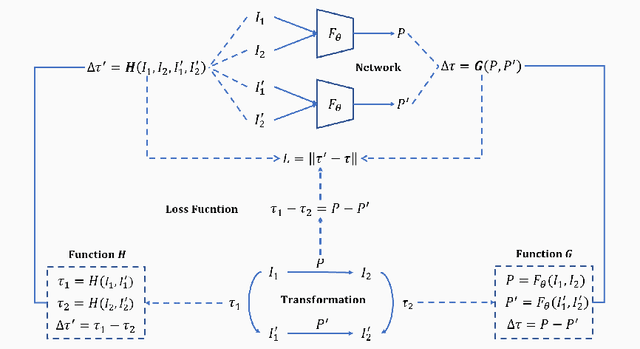
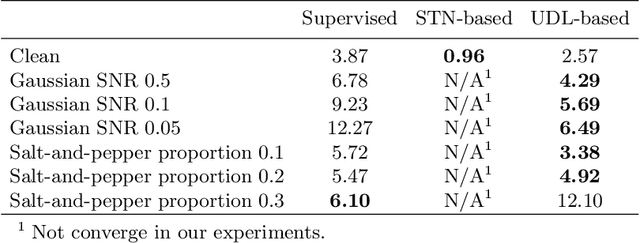
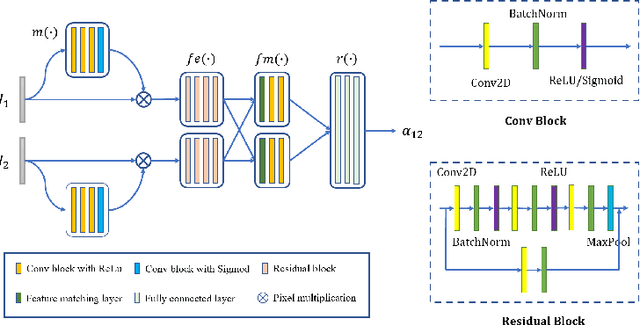

Rigid image alignment is a fundamental task in computer vision, while the traditional algorithms are either too sensitive to noise or time-consuming. Recent unsupervised image alignment methods developed based on spatial transformer networks show an improved performance on clean images but will not achieve satisfactory performance on noisy images due to its heavy reliance on pixel value comparations. To handle such challenging applications, we report a new unsupervised difference learning (UDL) strategy and apply it to rigid image alignment. UDL exploits the quantitative properties of regression tasks and converts the original unsupervised problem to pseudo supervised problem. Under the new UDL-based image alignment pipeline, rotation can be accurately estimated on both clean and noisy images and translations can then be easily solved. Experimental results on both nature and cryo-EM images demonstrate the efficacy of our UDL-based unsupervised rigid image alignment method.
Multiband Delay Estimation for Localization Using a Two-Stage Global Estimation Scheme
Jun 20, 2022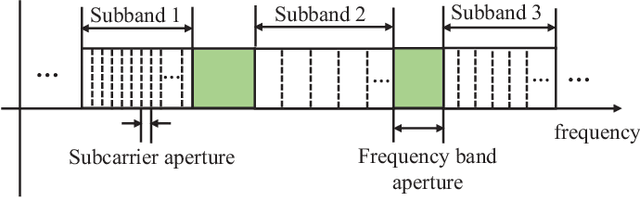
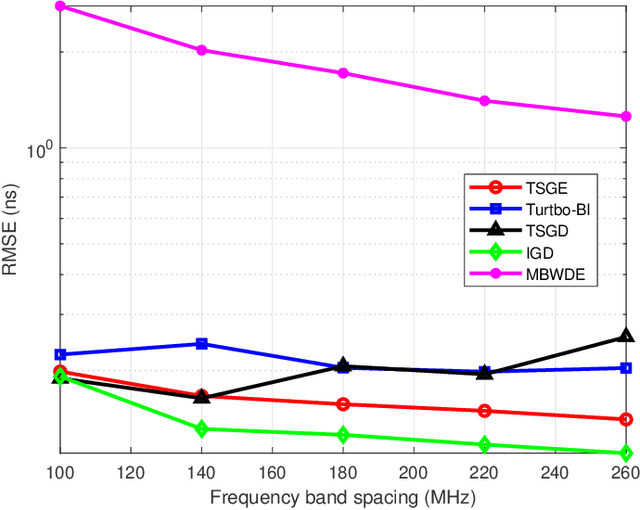
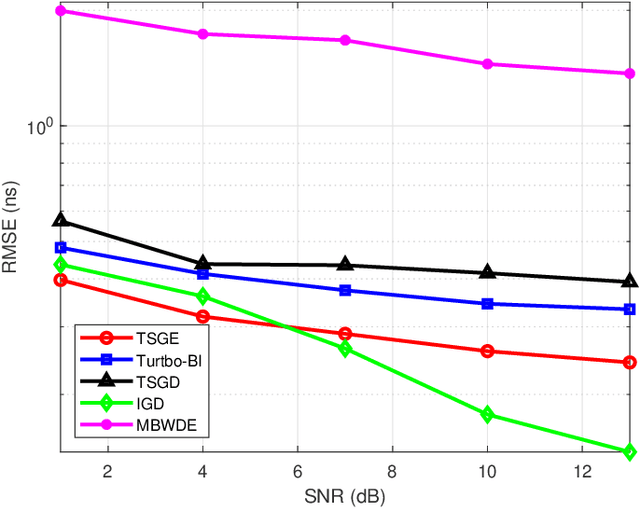
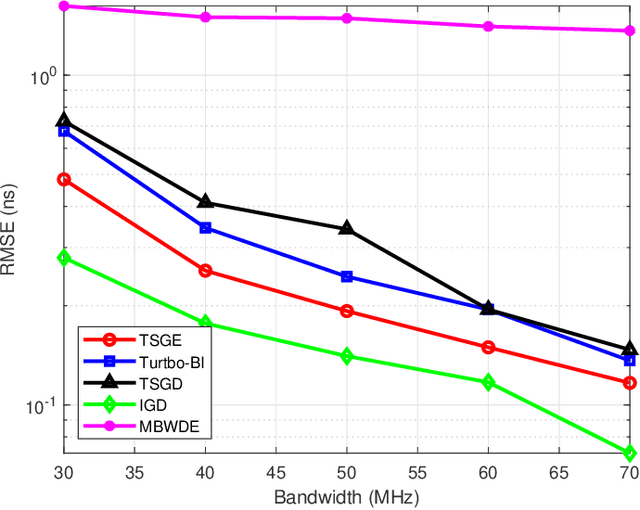
The time of arrival (TOA)-based localization techniques, which need to estimate the delay of the line-of-sight (LoS) path, have been widely employed in location-aware networks. To achieve a high-accuracy delay estimation, a number of multiband-based algorithms have been proposed recently, which exploit the channel state information (CSI) measurements over multiple non-contiguous frequency bands. However, to the best of our knowledge, there still lacks an efficient scheme that fully exploits the multiband gains when the phase distortion factors caused by hardware imperfections are considered, due to that the associated multi-parameter estimation problem contains many local optimums and the existing algorithms can easily get stuck in a "bad" local optimum. To address these issues, we propose a novel two-stage global estimation (TSGE) scheme for multiband delay estimation. In the coarse stage, we exploit the group sparsity structure of the multiband channel and propose a Turbo Bayesian inference (Turbo-BI) algorithm to achieve a good initial delay estimation based on a coarse signal model, which is transformed from the original multiband signal model by absorbing the carrier frequency terms. The estimation problem derived from the coarse signal model contains less local optimums and thus a more stable estimation can be achieved than directly using the original signal model. Then in the refined stage, with the help of coarse estimation results to narrow down the search range, we perform a global delay estimation using a particle swarm optimization-least square (PSO-LS) algorithm based on a refined multiband signal model to exploit the multiband gains to further improve the estimation accuracy. Simulation results show that the proposed TSGE significantly outperforms the benchmarks with comparative computational complexity.
DenseLiDAR: A Real-Time Pseudo Dense Depth Guided Depth Completion Network
Aug 28, 2021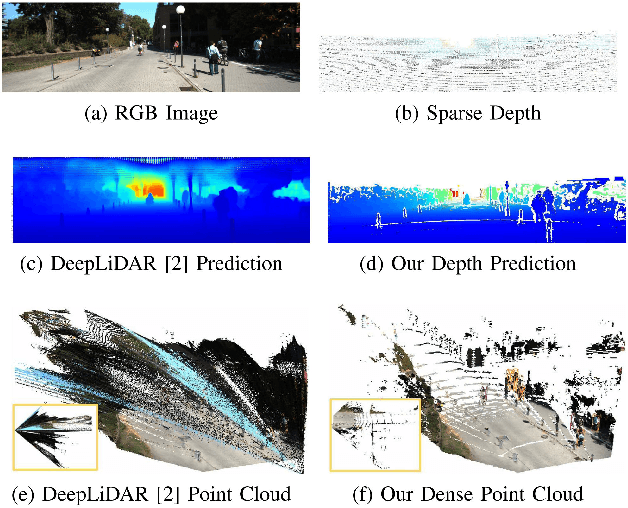
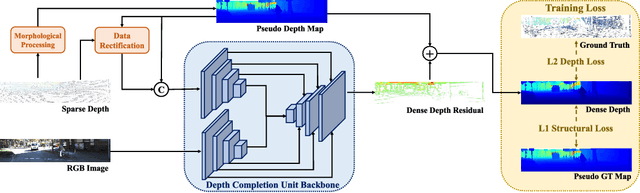
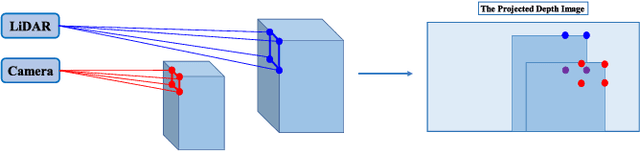
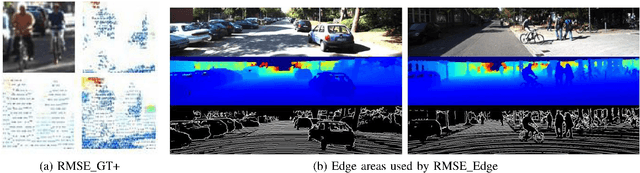
Depth Completion can produce a dense depth map from a sparse input and provide a more complete 3D description of the environment. Despite great progress made in depth completion, the sparsity of the input and low density of the ground truth still make this problem challenging. In this work, we propose DenseLiDAR, a novel real-time pseudo-depth guided depth completion neural network. We exploit dense pseudo-depth map obtained from simple morphological operations to guide the network in three aspects: (1) Constructing a residual structure for the output; (2) Rectifying the sparse input data; (3) Providing dense structural loss for training the network. Thanks to these novel designs, higher performance of the output could be achieved. In addition, two new metrics for better evaluating the quality of the predicted depth map are also presented. Extensive experiments on KITTI depth completion benchmark suggest that our model is able to achieve the state-of-the-art performance at the highest frame rate of 50Hz. The predicted dense depth is further evaluated by several downstream robotic perception or positioning tasks. For the task of 3D object detection, 3~5 percent performance gains on small objects categories are achieved on KITTI 3D object detection dataset. For RGB-D SLAM, higher accuracy on vehicle's trajectory is also obtained in KITTI Odometry dataset. These promising results not only verify the high quality of our depth prediction, but also demonstrate the potential of improving the related downstream tasks by using depth completion results.
* 9 pages, 7 figures, published in IEEE Robotics and Automation Letters and Accepted by ICRA2021
Multi-Armed Bandits in Brain-Computer Interfaces
May 19, 2022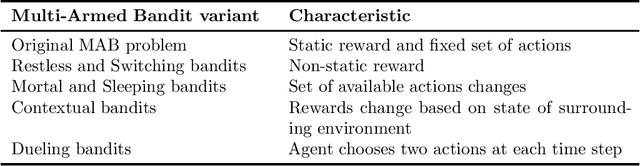
The multi-armed bandit (MAB) problem models a decision-maker that optimizes its actions based on current and acquired new knowledge to maximize its reward. This type of online decision is prominent in many procedures of Brain-Computer Interfaces (BCIs) and MAB has previously been used to investigate, e.g., what mental commands to use to optimize BCI performance. However, MAB optimization in the context of BCI is still relatively unexplored, even though it has the potential to improve BCI performance during both calibration and real-time implementation. Therefore, this review aims to further introduce MABs to the BCI community. The review includes a background on MAB problems and standard solution methods, and interpretations related to BCI systems. Moreover, it includes state-of-the-art concepts of MAB in BCI and suggestions for future research.
SymForce: Symbolic Computation and Code Generation for Robotics
Apr 17, 2022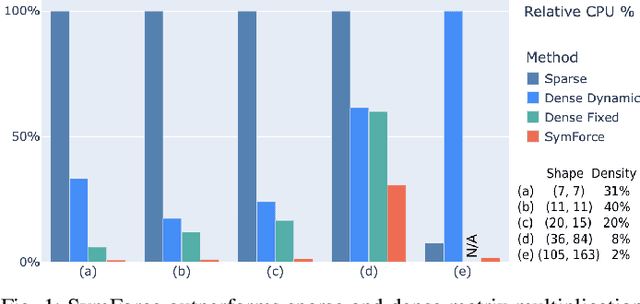
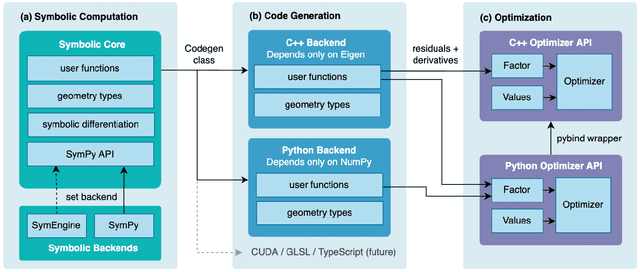
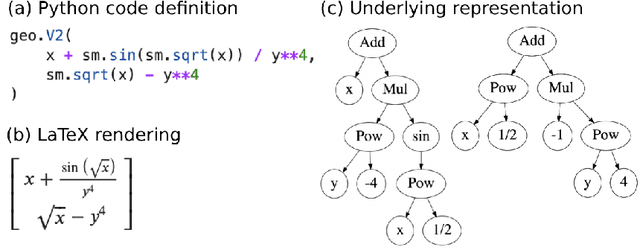
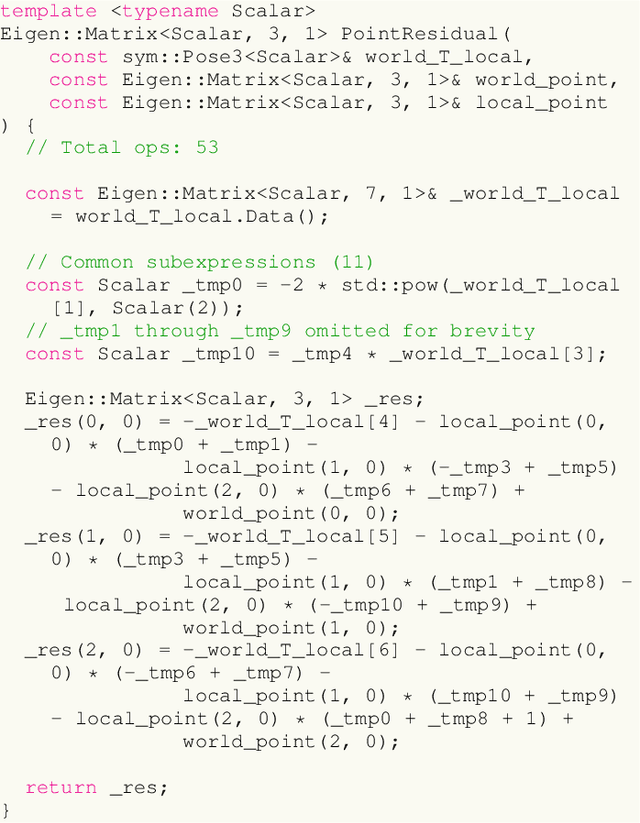
We present SymForce, a fast symbolic computation and code generation library for robotics applications like computer vision, state estimation, motion planning, and controls. SymForce combines the development speed and flexibility of symbolic mathematics with the performance of autogenerated, highly optimized code in C++ or any target runtime language. SymForce provides geometry and camera types, Lie group operations, and branchless singularity handling for creating and analyzing complex symbolic expressions in Python, built on top of SymPy. Generated functions can be integrated as factors into our tangent space nonlinear optimizer, which is highly optimized for real-time production use. We introduce novel methods to automatically compute tangent space Jacobians, eliminating the need for bug-prone handwritten derivatives. This workflow enables faster runtime code, faster development time, and fewer lines of handwritten code versus the state-of-the-art. Our experiments demonstrate that our approach can yield order of magnitude speedups on computational tasks core to robotics. Code is available at https://github.com/symforce-org/symforce .
Multi-Sensor Data Fusion for Accurate Traffic Speed and Travel Time Reconstruction
May 08, 2021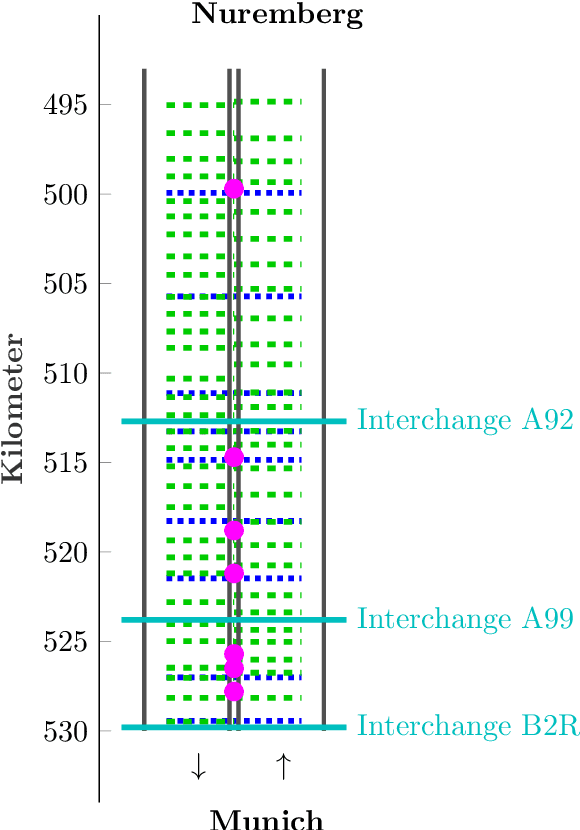
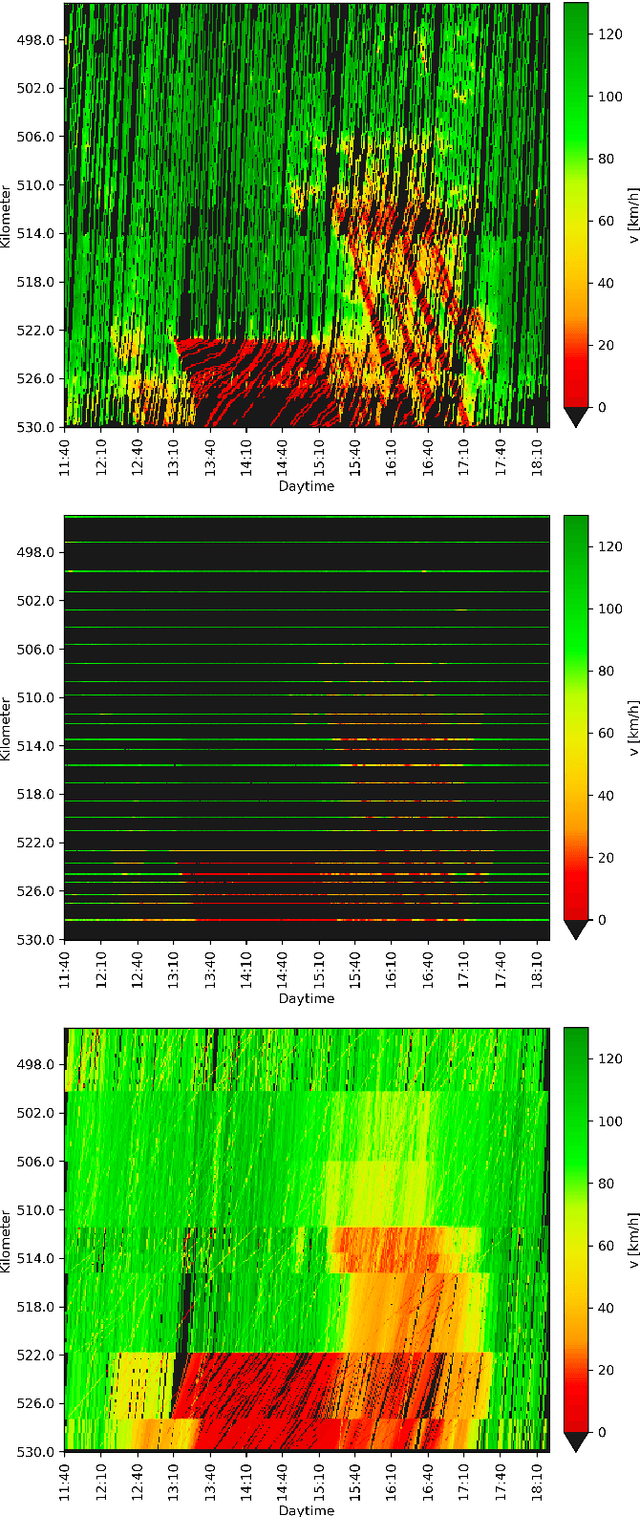
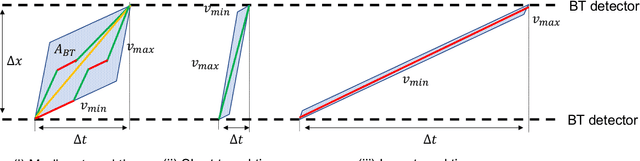
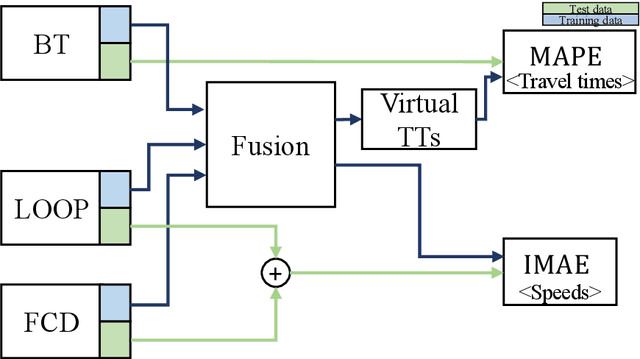
This paper studies the joint reconstruction of traffic speeds and travel times by fusing sparse sensor data. Raw speed data from inductive loop detectors and floating cars as well as travel time measurements are combined using different fusion techniques. A novel fusion approach is developed which extends existing speed reconstruction methods to integrate low-resolution travel time data. Several state-of-the-art methods and the novel approach are evaluated on their performance in reconstructing traffic speeds and travel times using various combinations of sensor data. Algorithms and sensor setups are evaluated with real loop detector, floating car and Bluetooth data collected during severe congestion on German freeway A9. Two main aspects are examined: (i) which algorithm provides the most accurate result depending on the used data and (ii) which type of sensor and which combination of sensors yields higher estimation accuracies. Results show that, overall, the novel approach applied to a combination of floating-car data and loop data provides the best speed and travel time accuracy. Furthermore, a fusion of sources improves the reconstruction quality in many, but not all cases. In particular, Bluetooth data only provide a benefit for reconstruction purposes if integrated distinctively.