 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCGU-ILALab at FoodBench-QA 2026: Comparing Traditional and LLM-based Approaches for Recipe Nutrient Estimation
Apr 28, 2026Accurate nutrient estimation from unstructured recipe text is an important yet challenging problem in dietary monitoring, due to ambiguous ingredient terminology and highly variable quantity expressions. We systematically evaluate models spanning a wide range of representational capacity, from lexical matching methods (TF-IDF with Ridge Regression), to deep semantic encoders (DeBERTa-v3), to generative reasoning with large language models (LLMs). Under the strict tolerance criteria defined by EU Regulation 1169/2011, our empirical results reveal a clear trade-off between predictive accuracy and computational efficiency. The TF-IDF baseline achieves moderate nutrient estimation performance with near-instantaneous inference, whereas the DeBERTa-v3 encoder performs poorly under task-specific data scarcity. In contrast, few-shot LLM inference (e.g., Gemini 2.5 Flash) and a hybrid LLM refinement pipeline (TF-IDF combined with Gemini 2.5 Flash) deliver the highest validation accuracy across all nutrient categories. These improvements likely arise from the ability of LLMs to leverage pre-trained world knowledge to resolve ambiguous terminology and normalize non-standard units, which remain difficult for purely lexical approaches. However, these gains come at the cost of substantially higher inference latency, highlighting a practical deployment trade-off between real-time efficiency and nutritional precision in dietary monitoring systems.
Recent development of optical electric current transformer and its obstacles
Dec 09, 2024Conventional electromagnetic induction-based current transformers suffer from issues such as bulky and complex structures, slow response times, and low safety levels. Consequently, researchers have explored combining various sensing technologies with optical fibers to develop optical current transformers that could become the primary choice for power systems in the future. With the maturation of optoelectronic technology, optical current transformers have emerged. They offer outstanding advantages, including high sensitivity, integration, stability, and the ability to operate in complex environments. This review categorizes optical current transformers based on different principles, including all-fiber current transformers, those based on magnetostrictive effects, magneto-optic effects, and thermal effects. It also discusses their principles, structures, manufacturing techniques, and signal processing, while forecasting their future development trends.
Unsupervised Difference Learning for Noisy Rigid Image Alignment
May 24, 2022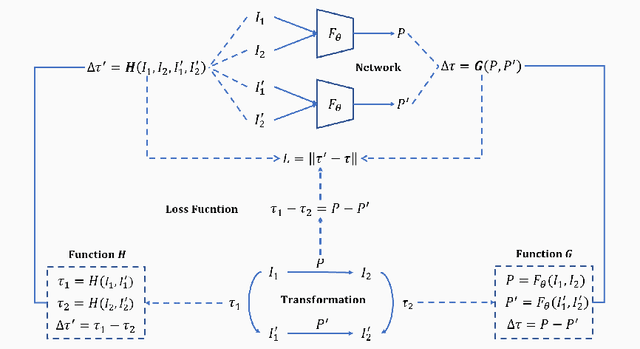
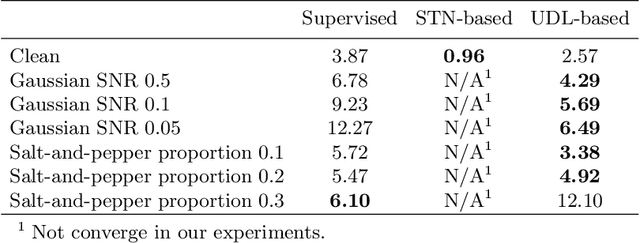
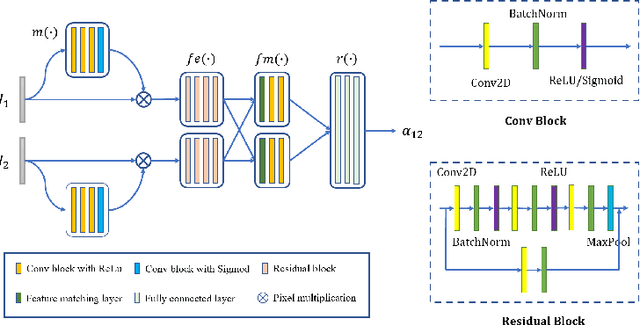

Rigid image alignment is a fundamental task in computer vision, while the traditional algorithms are either too sensitive to noise or time-consuming. Recent unsupervised image alignment methods developed based on spatial transformer networks show an improved performance on clean images but will not achieve satisfactory performance on noisy images due to its heavy reliance on pixel value comparations. To handle such challenging applications, we report a new unsupervised difference learning (UDL) strategy and apply it to rigid image alignment. UDL exploits the quantitative properties of regression tasks and converts the original unsupervised problem to pseudo supervised problem. Under the new UDL-based image alignment pipeline, rotation can be accurately estimated on both clean and noisy images and translations can then be easily solved. Experimental results on both nature and cryo-EM images demonstrate the efficacy of our UDL-based unsupervised rigid image alignment method.
Team NCTU: Toward AI-Driving for Autonomous Surface Vehicles -- From Duckietown to RobotX
Oct 31, 2019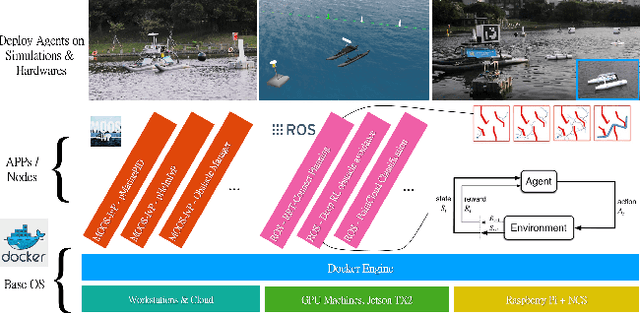
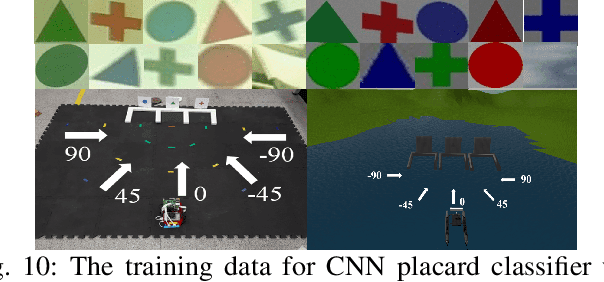
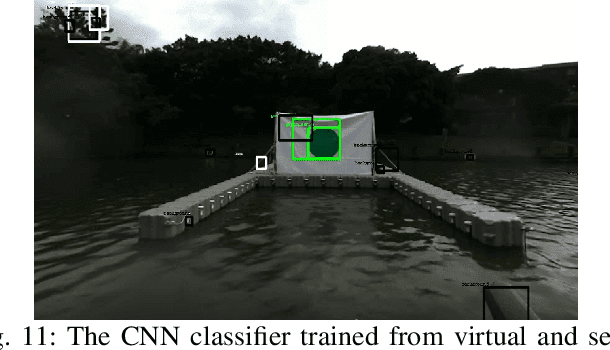
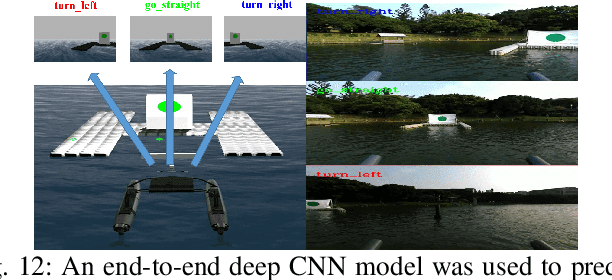
Robotic software and hardware systems of autonomous surface vehicles have been developed in transportation, military, and ocean researches for decades. Previous efforts in RobotX Challenges 2014 and 2016 facilitates the developments for important tasks such as obstacle avoidance and docking. Team NCTU is motivated by the AI Driving Olympics (AI-DO) developed by the Duckietown community, and adopts the principles to RobotX challenge. With the containerization (Docker) and uniformed AI agent (with observations and actions), we could better 1) integrate solutions developed in different middlewares (ROS and MOOS), 2) develop essential functionalities of from simulation (Gazebo) to real robots (either miniaturized or full-sized WAM-V), and 3) compare different approaches either from classic model-based or learning-based. Finally, we setup an outdoor on-surface platform with localization services for evaluation. Some of the preliminary results will be presented for the Team NCTU participations of the RobotX competition in Hawaii in 2018.