Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-in-the-loop Robotic Grasping using BERT Scene Representation
Paper and Code
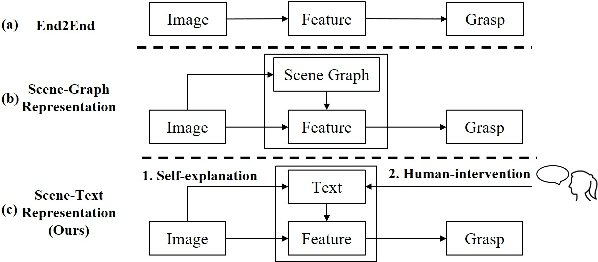
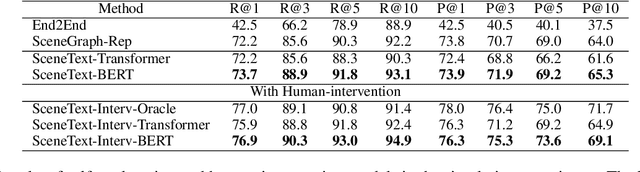
Current NLP techniques have been greatly applied in different domains. In this paper, we propose a human-in-the-loop framework for robotic grasping in cluttered scenes, investigating a language interface to the grasping process, which allows the user to intervene by natural language commands. This framework is constructed on a state-of-the-art rasping baseline, where we substitute a scene-graph representation with a text representation of the scene using BERT. Experiments on both simulation and physical robot show that the proposed method outperforms conventional object-agnostic and scene-graph based methods in the literature. In addition, we find that with human intervention, performance can be significantly improved.
* 15 pages, 10 figures, Coling2022 Oral
View paper on