 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Visibility for Robust Dense Human Body Estimation
Paper and Code
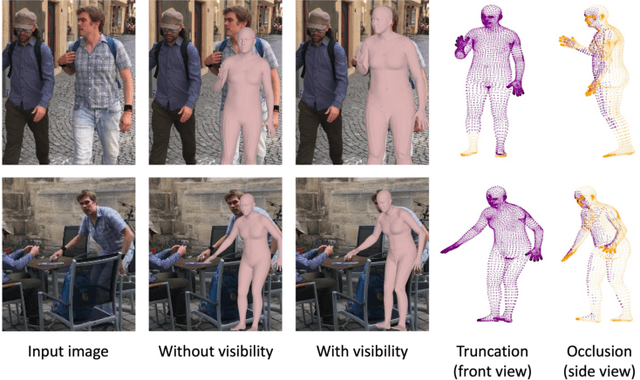
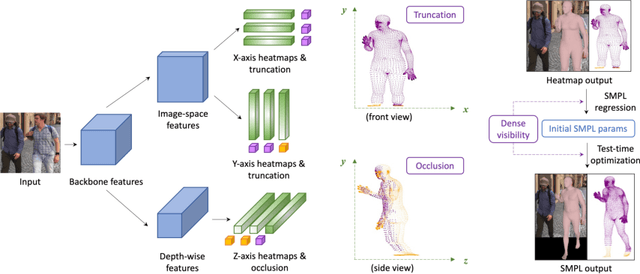

Estimating 3D human pose and shape from 2D images is a crucial yet challenging task. While prior methods with model-based representations can perform reasonably well on whole-body images, they often fail when parts of the body are occluded or outside the frame. Moreover, these results usually do not faithfully capture the human silhouettes due to their limited representation power of deformable models (e.g., representing only the naked body). An alternative approach is to estimate dense vertices of a predefined template body in the image space. Such representations are effective in localizing vertices within an image but cannot handle out-of-frame body parts. In this work, we learn dense human body estimation that is robust to partial observations. We explicitly model the visibility of human joints and vertices in the x, y, and z axes separately. The visibility in x and y axes help distinguishing out-of-frame cases, and the visibility in depth axis corresponds to occlusions (either self-occlusions or occlusions by other objects). We obtain pseudo ground-truths of visibility labels from dense UV correspondences and train a neural network to predict visibility along with 3D coordinates. We show that visibility can serve as 1) an additional signal to resolve depth ordering ambiguities of self-occluded vertices and 2) a regularization term when fitting a human body model to the predictions. Extensive experiments on multiple 3D human datasets demonstrate that visibility modeling significantly improves the accuracy of human body estimation, especially for partial-body cases. Our project page with code is at: https://github.com/chhankyao/visdb.