 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Sim2Real: Lower Fidelity Simulation Leads to Higher Sim2Real Transfer in Navigation
Paper and Code
Jul 21, 2022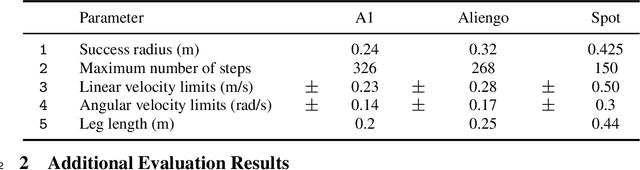
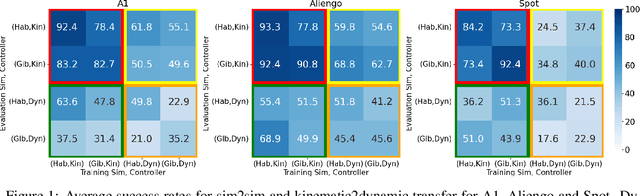


If we want to train robots in simulation before deploying them in reality, it seems natural and almost self-evident to presume that reducing the sim2real gap involves creating simulators of increasing fidelity (since reality is what it is). We challenge this assumption and present a contrary hypothesis -- sim2real transfer of robots may be improved with lower (not higher) fidelity simulation. We conduct a systematic large-scale evaluation of this hypothesis on the problem of visual navigation -- in the real world, and on 2 different simulators (Habitat and iGibson) using 3 different robots (A1, AlienGo, Spot). Our results show that, contrary to expectation, adding fidelity does not help with learning; performance is poor due to slow simulation speed (preventing large-scale learning) and overfitting to inaccuracies in simulation physics. Instead, building simple models of the robot motion using real-world data can improve learning and generalization.