 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward the smooth mesh climbing of a miniature robot using bioinspired soft and expandable claws
Paper and Code
Jun 15, 2022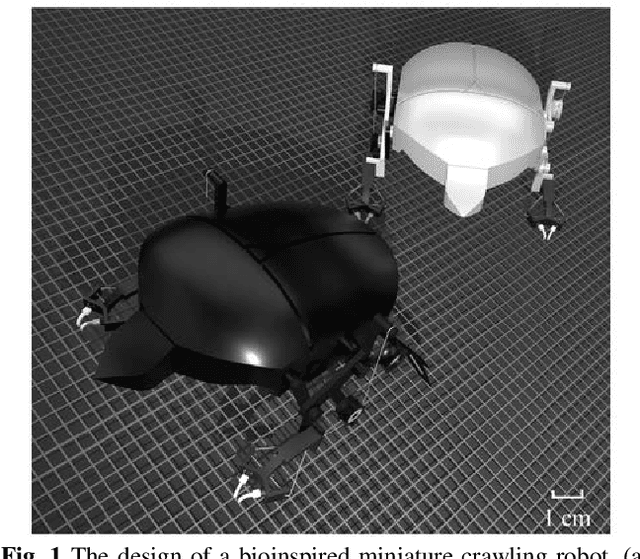
While most micro-robots face difficulty traveling on rugged and uneven terrain, beetles can walk smoothly on the complex substrate without slipping or getting stuck on the surface due to their stiffness-variable tarsi and expandable hooks on the tip of tarsi. In this study, we found that beetles actively bent and expanded their claws regularly to crawl freely on mesh surfaces. Inspired by the crawling mechanism of the beetles, we designed an 8-cm miniature climbing robot equipping artificial claws to open and bend in the same cyclic manner as natural beetles. The robot can climb freely with a controllable gait on the mesh surface, steep incline of the angle of 60{\deg}, and even transition surface. To our best knowledge, this is the first micro-scale robot that can climb both the mesh surface and cliffy incline.