 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTranslation Invariant Global Estimation of Heading Angle Using Sinogram of LiDAR Point Cloud
Paper and Code
Mar 02, 2022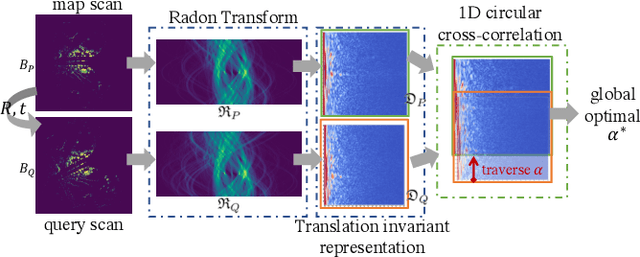
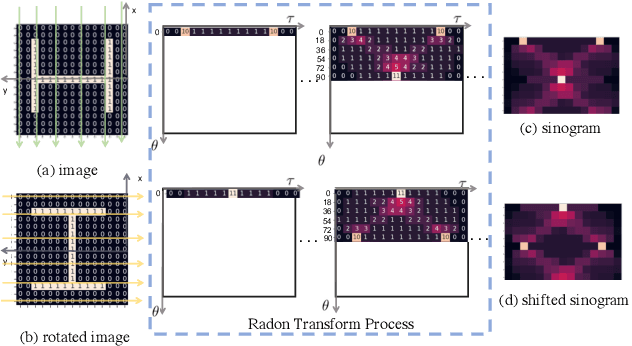
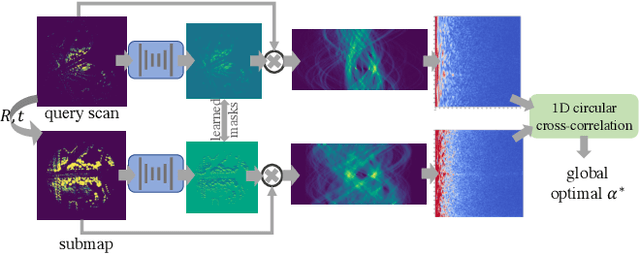
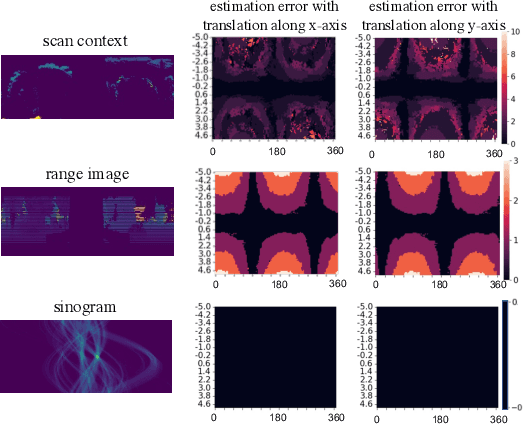
Global point cloud registration is an essential module for localization, of which the main difficulty exists in estimating the rotation globally without initial value. With the aid of gravity alignment, the degree of freedom in point cloud registration could be reduced to 4DoF, in which only the heading angle is required for rotation estimation. In this paper, we propose a fast and accurate global heading angle estimation method for gravity-aligned point clouds. Our key idea is that we generate a translation invariant representation based on Radon Transform, allowing us to solve the decoupled heading angle globally with circular cross-correlation. Besides, for heading angle estimation between point clouds with different distributions, we implement this heading angle estimator as a differentiable module to train a feature extraction network end- to-end. The experimental results validate the effectiveness of the proposed method in heading angle estimation and show better performance compared with other methods.