 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporally Consistent Online Depth Estimation in Dynamic Scenes
Paper and Code
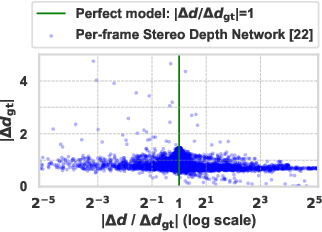
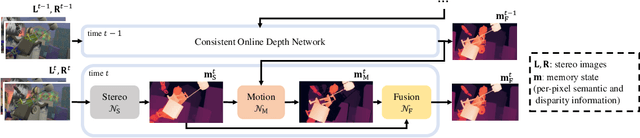
Temporally consistent depth estimation is crucial for real-time applications such as augmented reality. While stereo depth estimation has received substantial attention that led to improvements on a frame-by-frame basis, there is relatively little work focused on maintaining temporal consistency across frames. Indeed, based on our analysis, current stereo depth estimation techniques still suffer from poor temporal consistency. Stabilizing depth temporally in dynamic scenes is challenging due to concurrent object and camera motion. In an online setting, this process is further aggravated because only past frames are available. In this paper, we present a technique to produce temporally consistent depth estimates in dynamic scenes in an online setting. Our network augments current per-frame stereo networks with novel motion and fusion networks. The motion network accounts for both object and camera motion by predicting a per-pixel SE3 transformation. The fusion network improves consistency in prediction by aggregating the current and previous predictions with regressed weights. We conduct extensive experiments across varied datasets (synthetic, outdoor, indoor and medical). In both zero-shot generalization and domain fine-tuning, we demonstrate that our proposed approach outperforms competing methods in terms of temporal stability and per-frame accuracy, both quantitatively and qualitatively. Our code will be available online.