 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Assurances for Human-Robot Interaction via Confidence-aware Game-theoretic Human Models
Paper and Code
Sep 29, 2021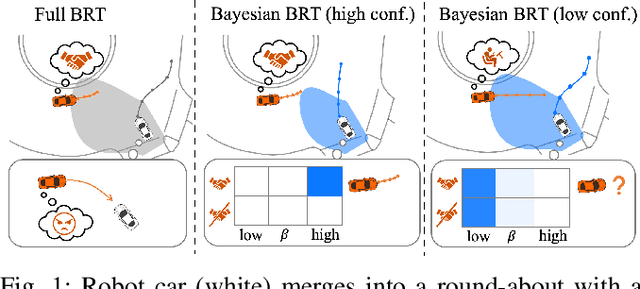
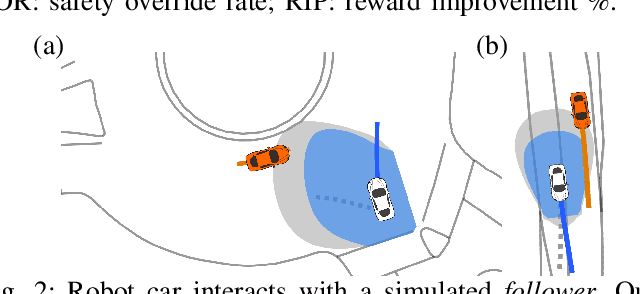
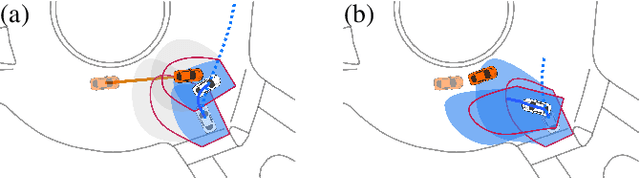
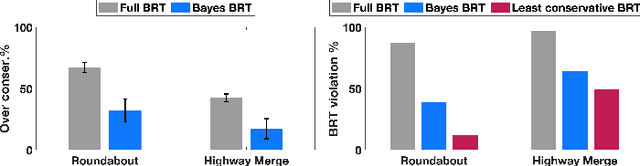
An outstanding challenge with safety methods for human-robot interaction is reducing their conservatism while maintaining robustness to variations in human behavior. In this work, we propose that robots use confidence-aware game-theoretic models of human behavior when assessing the safety of a human-robot interaction. By treating the influence between the human and robot as well as the human's rationality as unobserved latent states, we succinctly infer the degree to which a human is following the game-theoretic interaction model. We leverage this model to restrict the set of feasible human controls during safety verification, enabling the robot to confidently modulate the conservatism of its safety monitor online. Evaluations in simulated human-robot scenarios and ablation studies demonstrate that imbuing safety monitors with confidence-aware game-theoretic models enables both safe and efficient human-robot interaction. Moreover, evaluations with real traffic data show that our safety monitor is less conservative than traditional safety methods in real human driving scenarios.