 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiFT: Hierarchical Feature Transformer for Aerial Tracking
Paper and Code
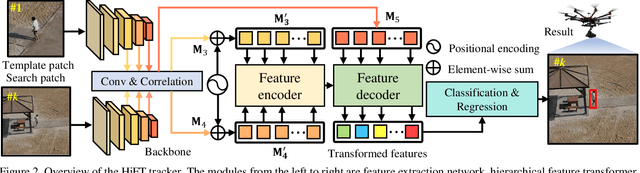
Most existing Siamese-based tracking methods execute the classification and regression of the target object based on the similarity maps. However, they either employ a single map from the last convolutional layer which degrades the localization accuracy in complex scenarios or separately use multiple maps for decision making, introducing intractable computations for aerial mobile platforms. Thus, in this work, we propose an efficient and effective hierarchical feature transformer (HiFT) for aerial tracking. Hierarchical similarity maps generated by multi-level convolutional layers are fed into the feature transformer to achieve the interactive fusion of spatial (shallow layers) and semantics cues (deep layers). Consequently, not only the global contextual information can be raised, facilitating the target search, but also our end-to-end architecture with the transformer can efficiently learn the interdependencies among multi-level features, thereby discovering a tracking-tailored feature space with strong discriminability. Comprehensive evaluations on four aerial benchmarks have proven the effectiveness of HiFT. Real-world tests on the aerial platform have strongly validated its practicability with a real-time speed. Our code is available at https://github.com/vision4robotics/HiFT.