 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAST-LIO2: Fast Direct LiDAR-inertial Odometry
Paper and Code
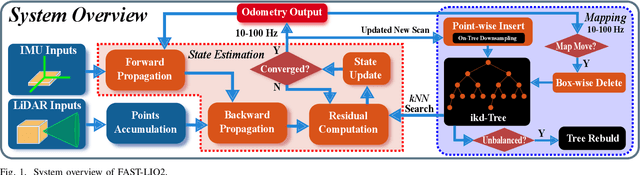
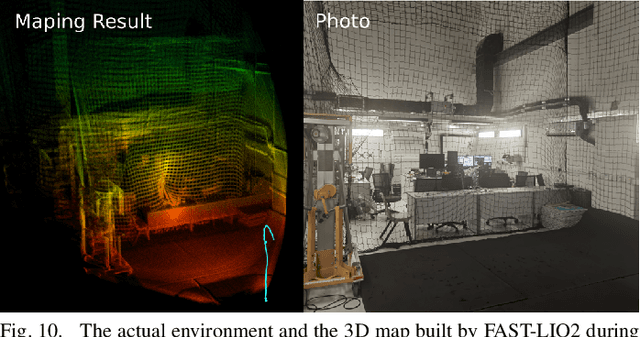
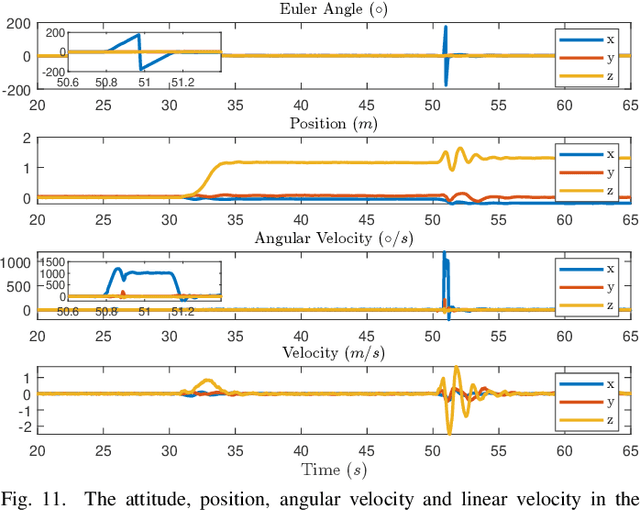
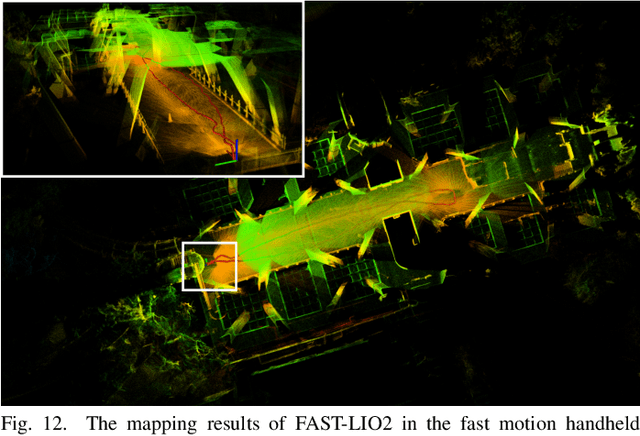
This paper presents FAST-LIO2: a fast, robust, and versatile LiDAR-inertial odometry framework. Building on a highly efficient tightly-coupled iterated Kalman filter, FAST-LIO2 has two key novelties that allow fast, robust, and accurate LiDAR navigation (and mapping). The first one is directly registering raw points to the map (and subsequently update the map, i.e., mapping) without extracting features. This enables the exploitation of subtle features in the environment and hence increases the accuracy. The elimination of a hand-engineered feature extraction module also makes it naturally adaptable to emerging LiDARs of different scanning patterns; The second main novelty is maintaining a map by an incremental k-d tree data structure, ikd-Tree, that enables incremental updates (i.e., point insertion, delete) and dynamic re-balancing. Compared with existing dynamic data structures (octree, R*-tree, nanoflann k-d tree), ikd-Tree achieves superior overall performance while naturally supports downsampling on the tree. We conduct an exhaustive benchmark comparison in 19 sequences from a variety of open LiDAR datasets. FAST-LIO2 achieves consistently higher accuracy at a much lower computation load than other state-of-the-art LiDAR-inertial navigation systems. Various real-world experiments on solid-state LiDARs with small FoV are also conducted. Overall, FAST-LIO2 is computationally-efficient (e.g., up to 100 Hz odometry and mapping in large outdoor environments), robust (e.g., reliable pose estimation in cluttered indoor environments with rotation up to 1000 deg/s), versatile (i.e., applicable to both multi-line spinning and solid-state LiDARs, UAV and handheld platforms, and Intel and ARM-based processors), while still achieving higher accuracy than existing methods. Our implementation of the system FAST-LIO2, and the data structure ikd-Tree are both open-sourced on Github.