 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisualizing Robot Intent for Object Handovers with Augmented Reality
Paper and Code
Mar 06, 2021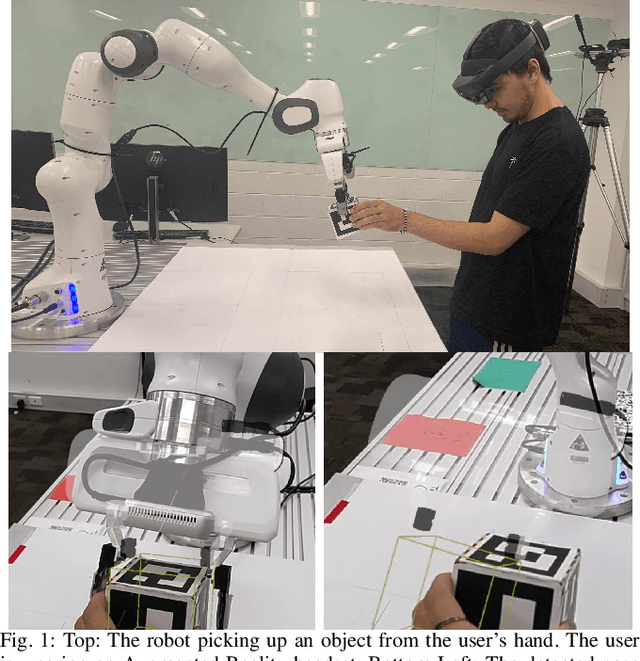
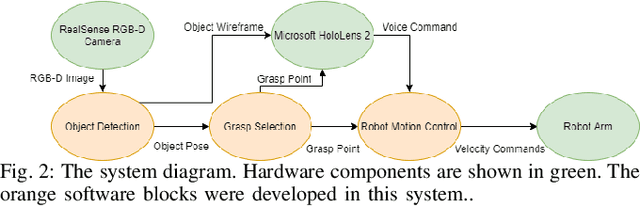
Humans are very skillful in communicating their intent for when and where a handover would occur. On the other hand, even the state-of-the-art robotic implementations for handovers display a general lack of communication skills. We propose visualizing the internal state and intent of robots for Human-to-Robot Handovers using Augmented Reality. Specifically, we visualize 3D models of the object and the robotic gripper to communicate the robot's estimation of where the object is and the pose that the robot intends to grasp the object. We conduct a user study with 16 participants, in which each participant handed over a cube-shaped object to the robot 12 times. Results show that visualizing robot intent using augmented reality substantially improves the subjective experience of the users for handovers and decreases the time to transfer the object. Results also indicate that the benefits of augmented reality are still present even when the robot makes errors in localizing the object.