 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Pose-only Solution to Visual Reconstruction and Navigation
Paper and Code
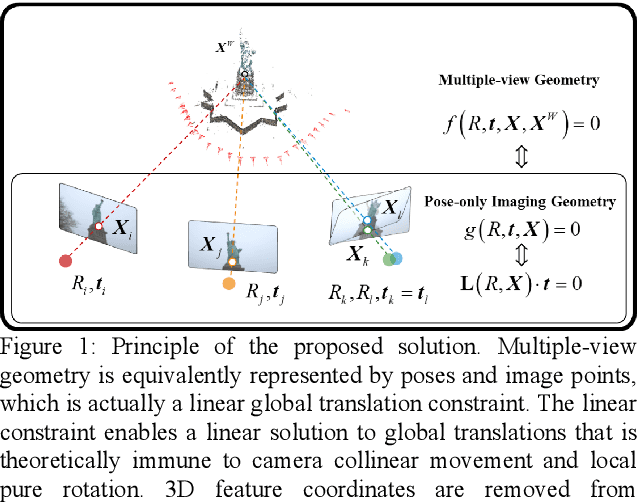
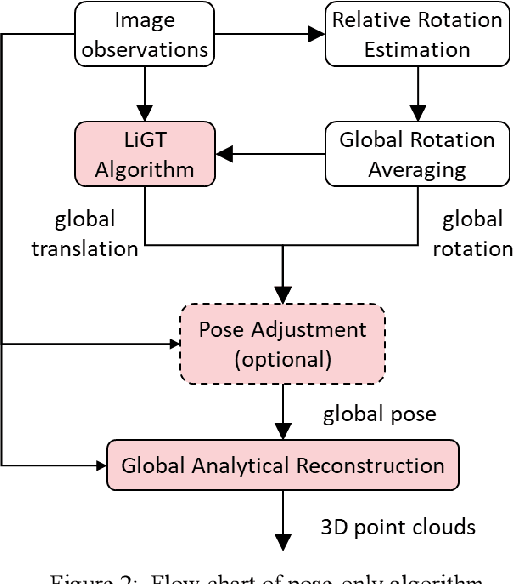
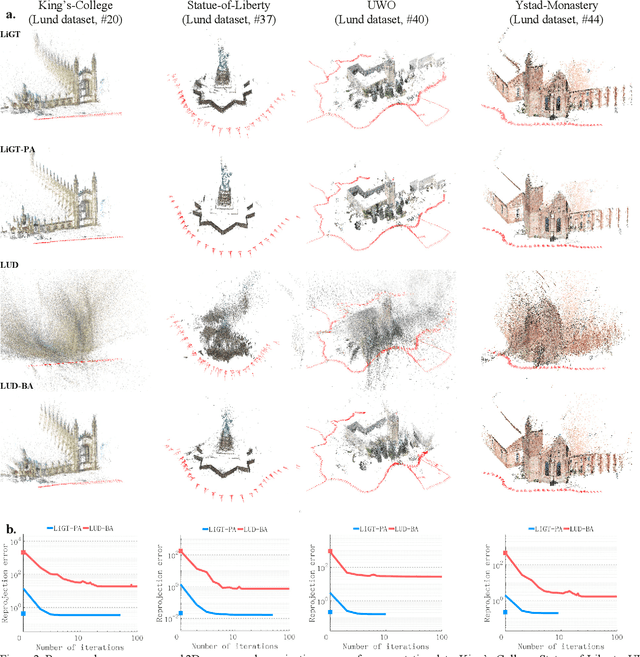
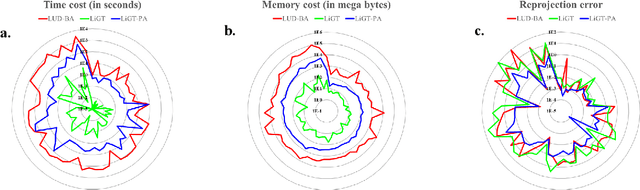
Visual navigation and three-dimensional (3D) scene reconstruction are essential for robotics to interact with the surrounding environment. Large-scale scenes and critical camera motions are great challenges facing the research community to achieve this goal. We raised a pose-only imaging geometry framework and algorithms that can help solve these challenges. The representation is a linear function of camera global translations, which allows for efficient and robust camera motion estimation. As a result, the spatial feature coordinates can be analytically reconstructed and do not require nonlinear optimization. Experiments demonstrate that the computational efficiency of recovering the scene and associated camera poses is significantly improved by 2-4 orders of magnitude. This solution might be promising to unlock real-time 3D visual computing in many forefront applications.