 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRODNet: A Real-Time Radar Object Detection Network Cross-Supervised by Camera-Radar Fused Object 3D Localization
Paper and Code
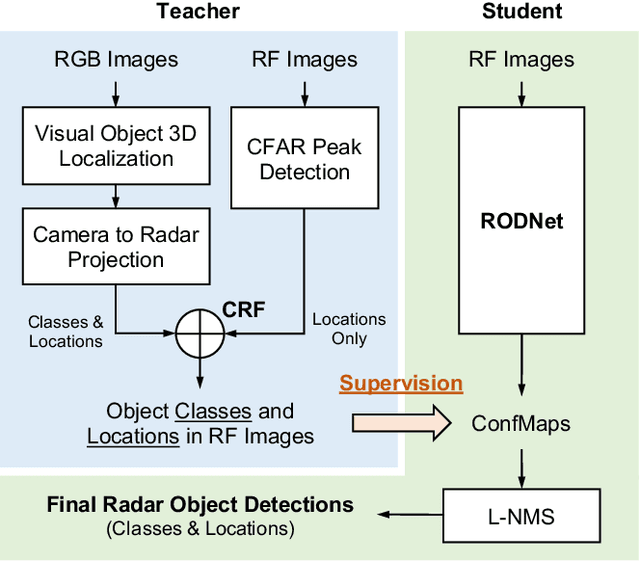
Various autonomous or assisted driving strategies have been facilitated through the accurate and reliable perception of the environment around a vehicle. Among the commonly used sensors, radar has usually been considered as a robust and cost-effective solution even in adverse driving scenarios, e.g., weak/strong lighting or bad weather. Instead of considering to fuse the unreliable information from all available sensors, perception from pure radar data becomes a valuable alternative that is worth exploring. In this paper, we propose a deep radar object detection network, named RODNet, which is cross-supervised by a camera-radar fused algorithm without laborious annotation efforts, to effectively detect objects from the radio frequency (RF) images in real-time. First, the raw signals captured by millimeter-wave radars are transformed to RF images in range-azimuth coordinates. Second, our proposed RODNet takes a sequence of RF images as the input to predict the likelihood of objects in the radar field of view (FoV). Two customized modules are also added to handle multi-chirp information and object relative motion. Instead of using human-labeled ground truth for training, the proposed RODNet is cross-supervised by a novel 3D localization of detected objects using a camera-radar fusion (CRF) strategy in the training stage. Finally, we propose a method to evaluate the object detection performance of the RODNet. Due to no existing public dataset available for our task, we create a new dataset, named CRUW, which contains synchronized RGB and RF image sequences in various driving scenarios. With intensive experiments, our proposed cross-supervised RODNet achieves 86% average precision and 88% average recall of object detection performance, which shows the robustness to noisy scenarios in various driving conditions.