 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeedback-based Digital Higher-order Terminal Sliding Mode for 6-DOF Industrial Manipulators
Paper and Code
Feb 06, 2021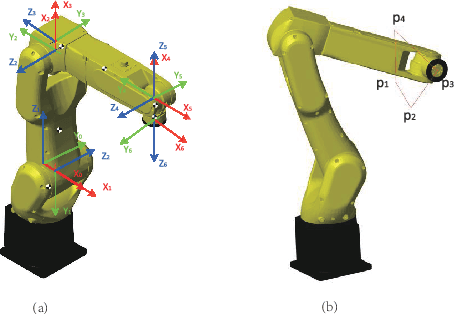
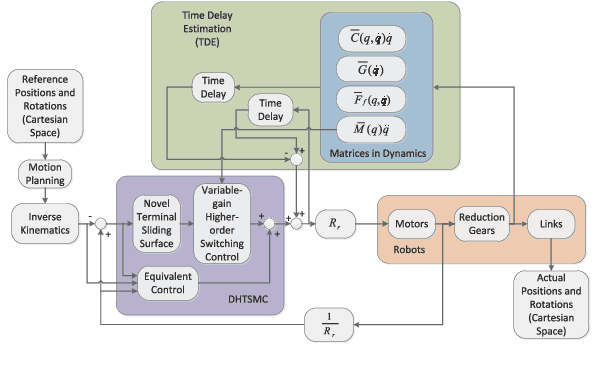
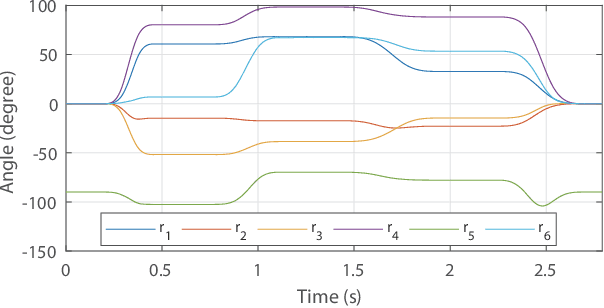
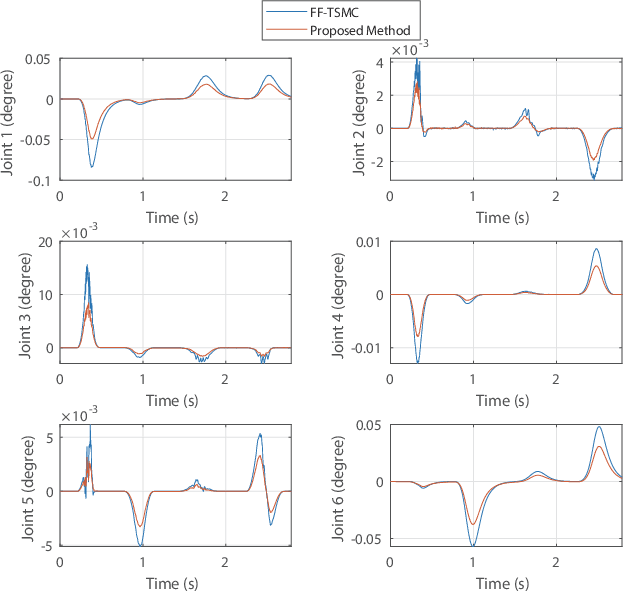
The precise motion control of a multi-degree of freedom~(DOF) robot manipulator is always challenging due to its nonlinear dynamics, disturbances, and uncertainties. Because most manipulators are controlled by digital signals, a novel higher-order sliding mode controller in the discrete-time form with time delay estimation is proposed in this paper. The dynamic model of the manipulator used in the design allows proper handling of nonlinearities, uncertainties and disturbances involved in the problem. Specifically, parametric uncertainties and disturbances are handled by the time delay estimation and the nonlinearity of the manipulator is addressed by the feedback structure of the controller. The combination of terminal sliding mode surface and higher-order control scheme in the controller guarantees a fast response with a small chattering amplitude. Moreover, the controller is designed with a modified sliding mode surface and variable-gain structure, so that the performance of the controller is further enhanced. We also analyze the condition to guarantee the stability of the closed-loop system in this paper. Finally, the simulation and experimental results prove that the proposed control scheme has a precise performance in a robot manipulator system.