 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Collaborative Visual SLAM Framework for Service Robots
Paper and Code
Feb 05, 2021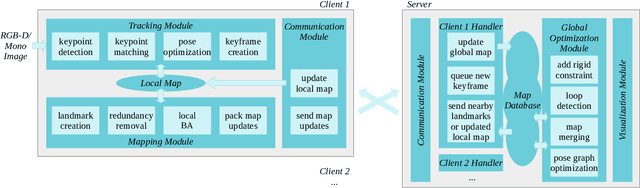
With the rapid deployment of service robots, a method should be established to allow multiple robots to work in the same place to collaborate and share the spatial information. To this end, we present a collaborative visual simultaneous localization and mapping (SLAM) framework particularly designed for service robot scenarios. With an edge server maintaining a map database and performing global optimization, each robot can register to an existing map, update the map, or build new maps, all with a unified interface and low computation and memory cost. To enable real-time information sharing, an efficient landmark retrieval method is proposed to allow each robot to get nearby landmarks observed by others. The framework is general enough to support both RGB-D and monocular cameras, as well as robots with multiple cameras, taking the rigid constraints between cameras into consideration. The proposed framework has been fully implemented and verified with public datasets and live experiments.