 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning-Based Automated Design Space Exploration for Autonomous Aerial Robots
Paper and Code
Feb 05, 2021
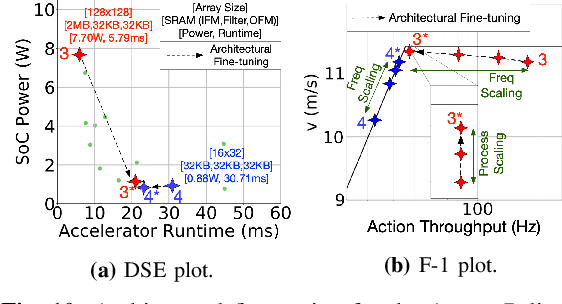
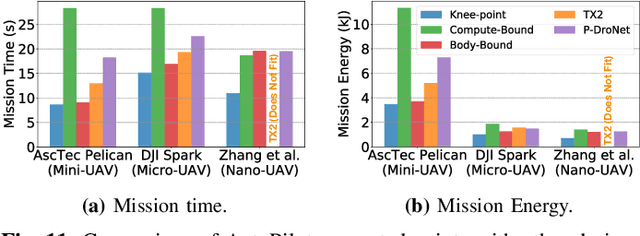

Building domain-specific architectures for autonomous aerial robots is challenging due to a lack of systematic methodology for designing onboard compute. We introduce a novel performance model called the F-1 roofline to help architects understand how to build a balanced computing system for autonomous aerial robots considering both its cyber (sensor rate, compute performance) and physical components (body-dynamics) that affect the performance of the machine. We use F-1 to characterize commonly used learning-based autonomy algorithms with onboard platforms to demonstrate the need for cyber-physical co-design. To navigate the cyber-physical design space automatically, we subsequently introduce AutoPilot. This push-button framework automates the co-design of cyber-physical components for aerial robots from a high-level specification guided by the F-1 model. AutoPilot uses Bayesian optimization to automatically co-design the autonomy algorithm and hardware accelerator while considering various cyber-physical parameters to generate an optimal design under different task level complexities for different robots and sensor framerates. As a result, designs generated by AutoPilot, on average, lower mission time up to 2x over baseline approaches, conserving battery energy.