 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Cross-Domain Correspondence for Control with Dynamics Cycle-Consistency
Paper and Code
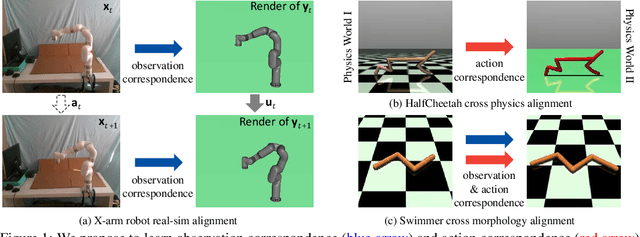
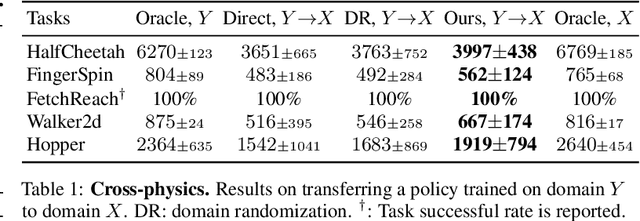
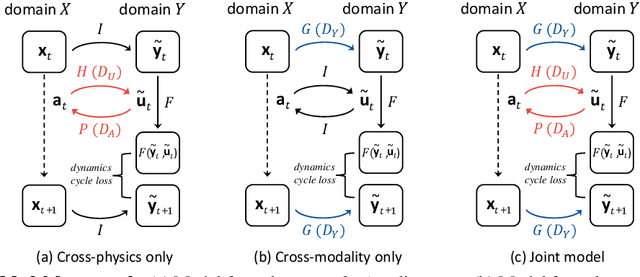

At the heart of many robotics problems is the challenge of learning correspondences across domains. For instance, imitation learning requires obtaining correspondence between humans and robots; sim-to-real requires correspondence between physics simulators and the real world; transfer learning requires correspondences between different robotics environments. This paper aims to learn correspondence across domains differing in representation (vision vs. internal state), physics parameters (mass and friction), and morphology (number of limbs). Importantly, correspondences are learned using unpaired and randomly collected data from the two domains. We propose \textit{dynamics cycles} that align dynamic robot behavior across two domains using a cycle-consistency constraint. Once this correspondence is found, we can directly transfer the policy trained on one domain to the other, without needing any additional fine-tuning on the second domain. We perform experiments across a variety of problem domains, both in simulation and on real robot. Our framework is able to align uncalibrated monocular video of a real robot arm to dynamic state-action trajectories of a simulated arm without paired data. Video demonstrations of our results are available at: https://sjtuzq.github.io/cycle_dynamics.html .