 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments
Paper and Code
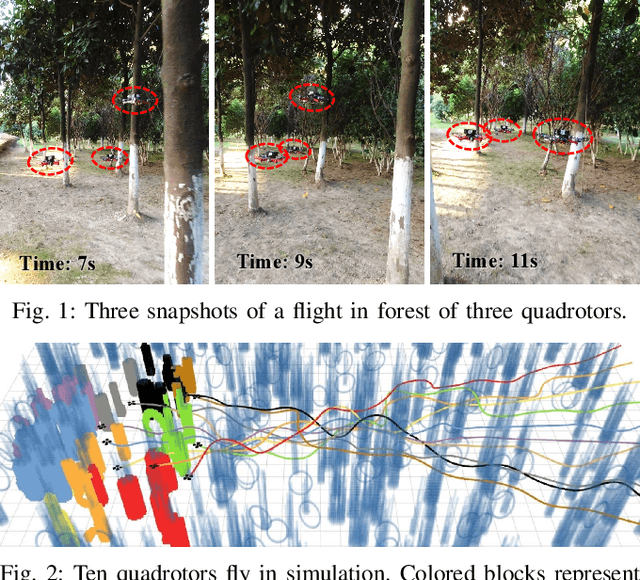

This paper presents a decentralized and asynchronous systematic solution for multi-robot autonomous navigation in unknown obstacle-rich scenes using merely onboard resources. The planning system is formulated under gradient-based local planning framework, where collision avoidance is achieved by formulating the collision risk as a penalty of a nonlinear optimization problem. In order to improve robustness and escape local minima, we incorporate a lightweight topological trajectory generation method. Then agents generate safe, smooth, and dynamically feasible trajectories in only several milliseconds using an unreliable trajectory sharing network. Relative localization drift among agents is corrected by using agent detection in depth images. Our method is demonstrated in both simulation and real-world experiments. The source code is released for the reference of the community.