 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Structure Aided Visual Inertial Localization
Paper and Code
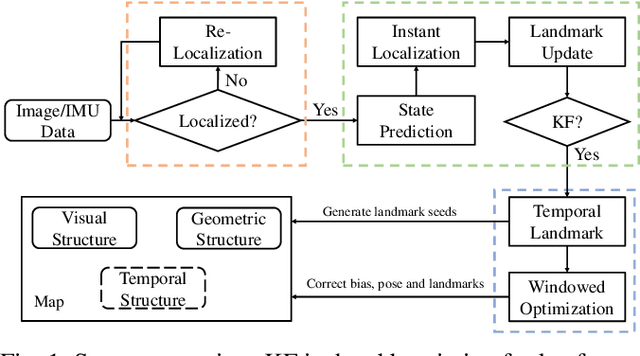
Visual Localization is an essential component in autonomous navigation. Existing approaches are either based on the visual structure from SLAM/SfM or the geometric structure from dense mapping. To take the advantages of both, in this work, we present a complete visual inertial localization system based on a hybrid map representation to reduce the computational cost and increase the positioning accuracy. Specially, we propose two modules for data association and batch optimization, respectively. To this end, we develop an efficient data association module to associate map components with local features, which takes only $2$ms to generate temporal landmarks. For batch optimization, instead of using visual factors, we develop a module to estimate a pose prior from the instant localization results to constrain poses. The experimental results on the EuRoC MAV dataset demonstrate a competitive performance compared to the state of the arts. Specially, our system achieves an average position error in 1.7 cm with 100% recall. The timings show that the proposed modules reduce the computational cost by 20-30%. We will make our implementation open source at http://github.com/hyhuang1995/gmmloc.