Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceive, Attend, and Drive: Learning Spatial Attention for Safe Self-Driving
Paper and Code
Nov 02, 2020
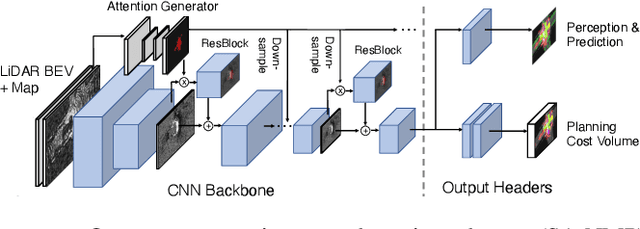
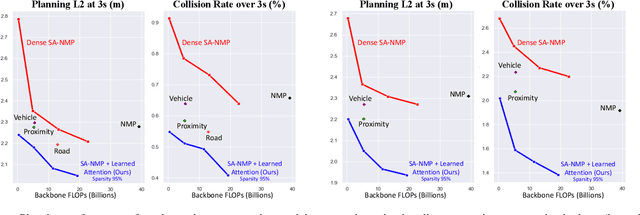
In this paper, we propose an end-to-end self-driving network featuring a sparse attention module that learns to automatically attend to important regions of the input. The attention module specifically targets motion planning, whereas prior literature only applied attention in perception tasks. Learning an attention mask directly targeted for motion planning significantly improves the planner safety by performing more focused computation. Furthermore, visualizing the attention improves interpretability of end-to-end self-driving.
View paper on