 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlternating Direction Method of Multipliers for Constrained Iterative LQR in Autonomous Driving
Paper and Code
Nov 01, 2020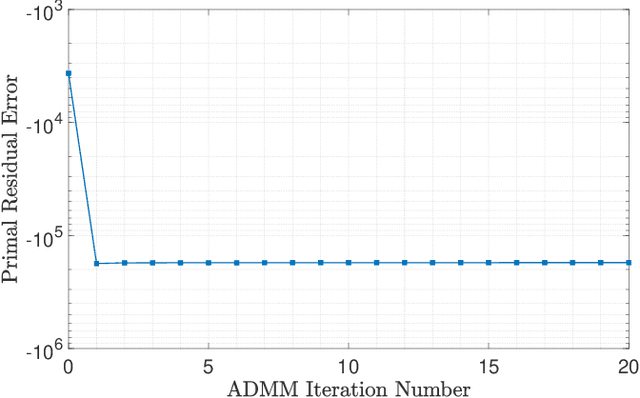
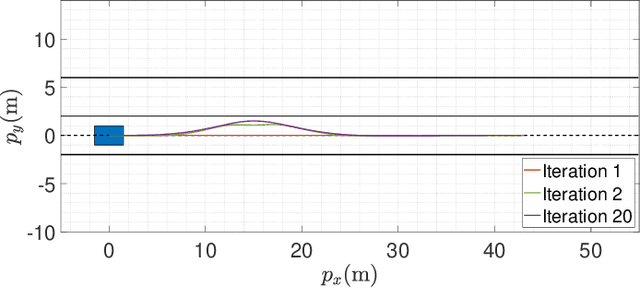
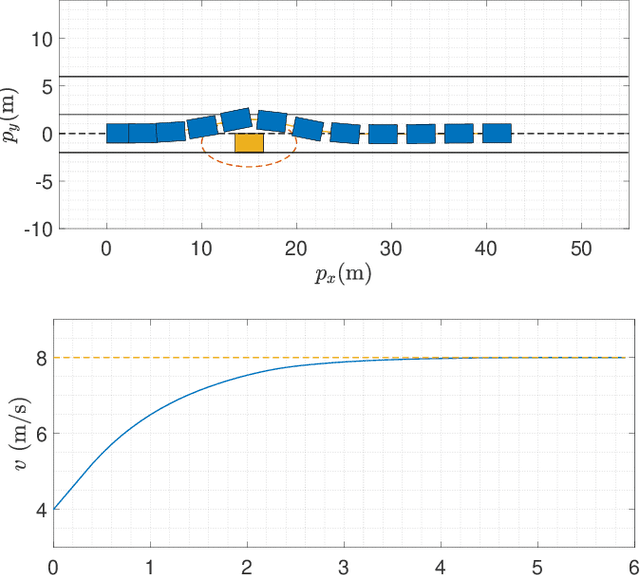
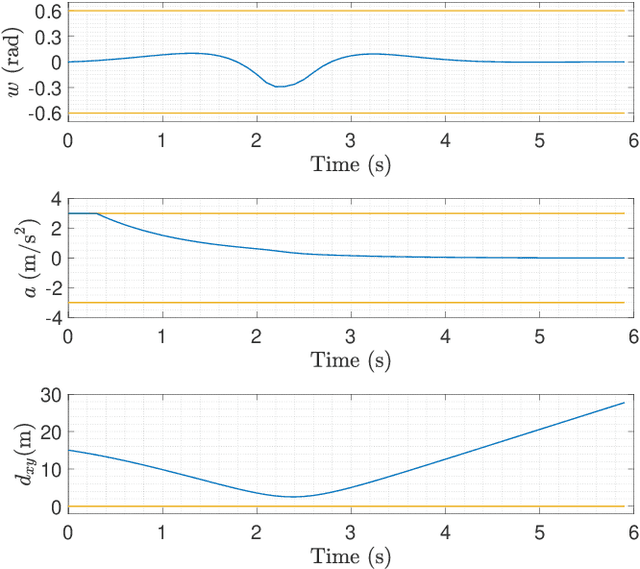
In the context of autonomous driving, the iterative linear quadratic regulator (iLQR) is known to be an efficient approach to deal with the nonlinear vehicle models in motion planning problems. Particularly, the constrained iLQR algorithm has shown noteworthy advantageous outcomes of computation efficiency in achieving motion planning tasks under general constraints of different types. However, the constrained iLQR methodology requires a feasible trajectory at the first iteration as a prerequisite. Also, the methodology leaves open the possibility for incorporation of fast, efficient, and effective optimization methods (i.e., fast-solvers) to further speed up the optimization process such that the requirements of real-time implementation can be successfully fulfilled. In this paper, a well-defined and commonly-encountered motion planning problem is formulated under nonlinear vehicle dynamics and various constraints, and an alternating direction method of multipliers (ADMM) is developed to determine the optimal control actions. With this development, the approach is able to circumvent the feasibility requirement of the trajectory at the first iteration. An illustrative example of motion planning in autonomous vehicles is then investigated with different driving scenarios taken into consideration. As clearly observed from the simulation results, the significance of this work in terms of obstacle avoidance is demonstrated. Furthermore, a noteworthy achievement of high computation efficiency is attained; and as a result, real-time computation and implementation can be realized through this framework, and thus it provides additional safety to the on-road driving tasks.