 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning of Hierarchical Driving Model: from Continuous Intention to Continuous Trajectory
Paper and Code
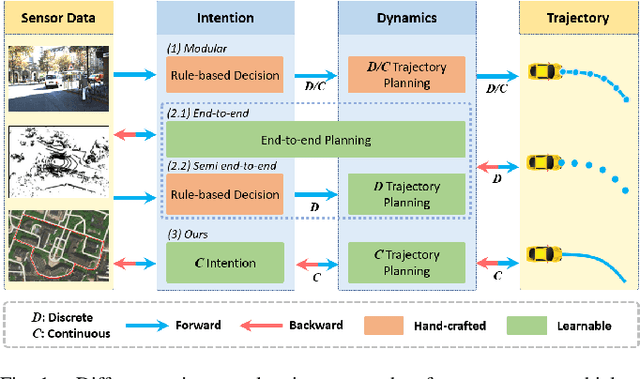
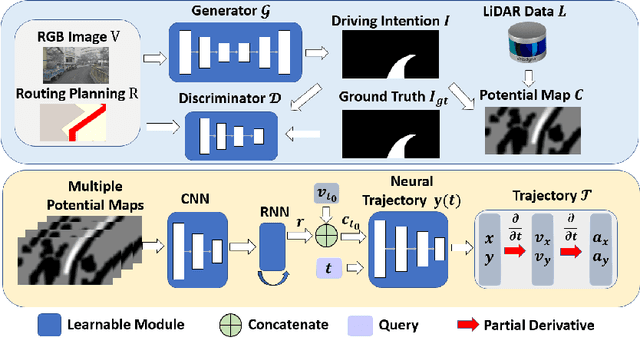
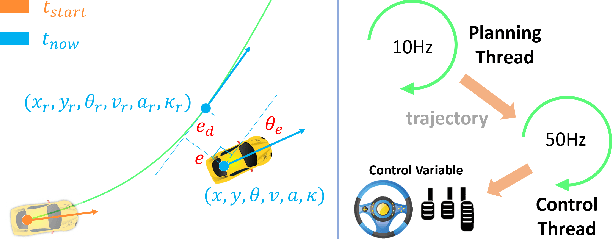
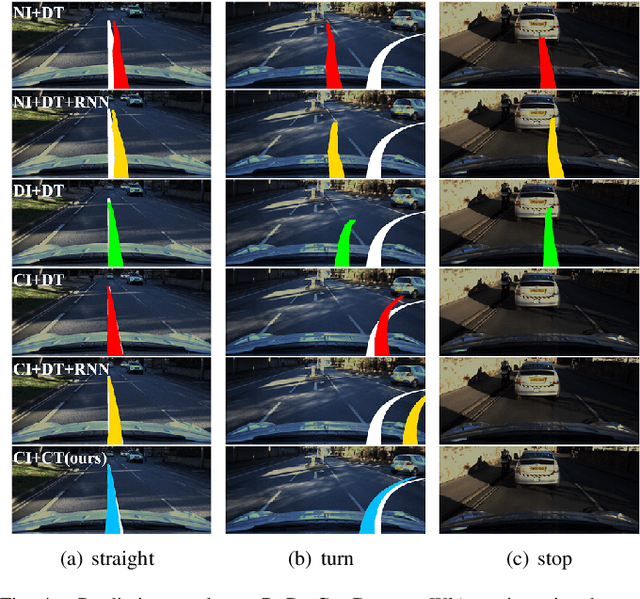
One of the challenges to reduce the gap between the machine and the human level driving is how to endow the system with the learning capacity to deal with the coupled complexity of environments, intentions, and dynamics. In this paper, we propose a hierarchical driving model with explicit model of continuous intention and continuous dynamics, which decouples the complexity in the observation-to-action reasoning in the human driving data. Specifically, the continuous intention module takes the route planning and perception to generate a potential map encoded with obstacles and goals being expressed as grid based potentials. Then, the potential map is regarded as a condition, together with the current dynamics, to generate the trajectory. The trajectory is modeled by a network based continuous function approximator, which naturally reserves the derivatives for high-order supervision without any additional parameters. Finally, we validate our method on both datasets and simulators, demonstrating superior performance. The method is also deployed on the real vehicle with loop latency, validating its effectiveness.