Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Hybrid Ground/Aerial Mobility in Unknown Environments
Paper and Code
Sep 11, 2020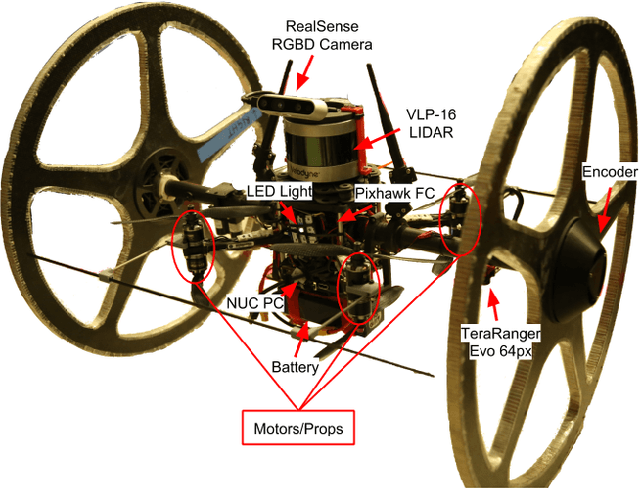


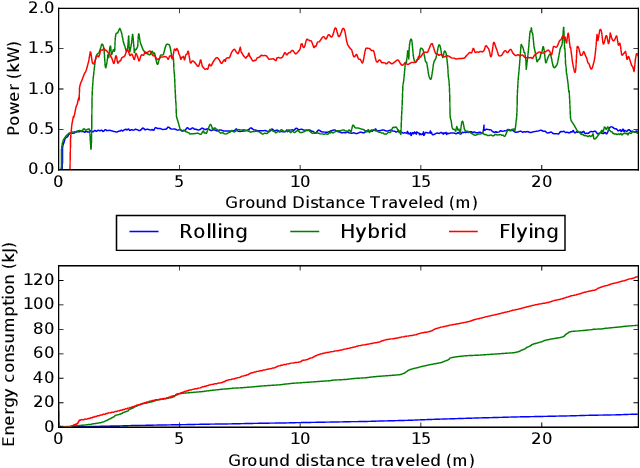
Hybrid ground and aerial vehicles can possess distinct advantages over ground-only or flight-only designs in terms of energy savings and increased mobility. In this work we outline our unified framework for controls, planning, and autonomy of hybrid ground/air vehicles. Our contribution is three-fold: 1) We develop a control scheme for the control of passive two-wheeled hybrid ground/aerial vehicles. 2) We present a unified planner for both rolling and flying by leveraging differential flatness mappings. 3) We conduct experiments leveraging mapping and global planning for hybrid mobility in unknown environments, showing that hybrid mobility uses up to five times less energy than flying only.
View paper on