 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning in Learned Latent Action Spaces for Generalizable Legged Locomotion
Paper and Code
Sep 18, 2020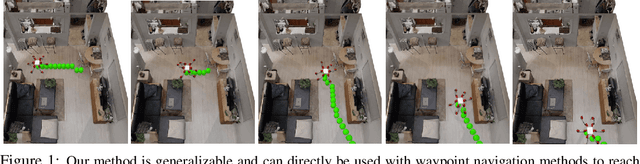
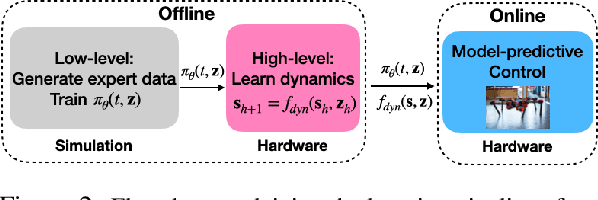
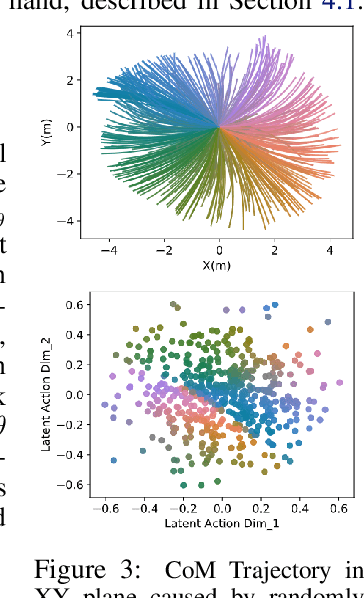
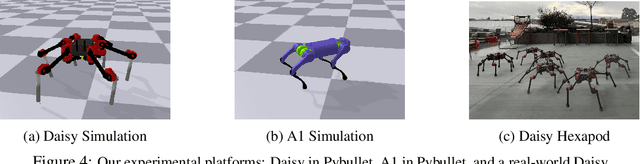
Hierarchical learning has been successful at learning generalizable locomotion skills on walking robots in a sample-efficient manner. However, the low-dimensional "latent" action used to communicate between different layers of the hierarchy is typically user-designed. In this work, we present a fully-learned hierarchical framework, that is capable of jointly learning the low-level controller and the high-level action space. Next, we plan over latent actions in a model-predictive control fashion, using a learned high-level dynamics model. This framework is generalizable to multiple robots, and we present results on a Daisy hexapod simulation, A1 quadruped simulation, and Daisy robot hardware. We compare a range of learned hierarchical approaches, and show that our framework is more reliable, versatile and sample-efficient. In addition to learning approaches, we also compare to an inverse-kinematics (IK) based footstep planner, and show that our fully-learned framework is competitive in performance with IK under normal conditions, and outperforms it in adverse settings. Our hardware experiments show the Daisy hexapod achieving multiple locomotion tasks, such as goal reaching, trajectory and velocity tracking in an unstructured outdoor setting, with only 2000 hardware samples.