 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Lane Graph Representations for Motion Forecasting
Paper and Code
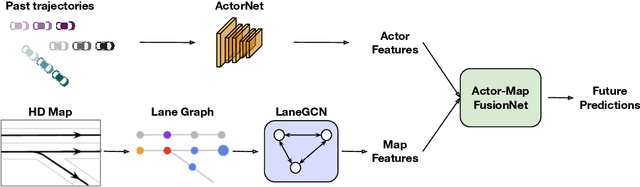
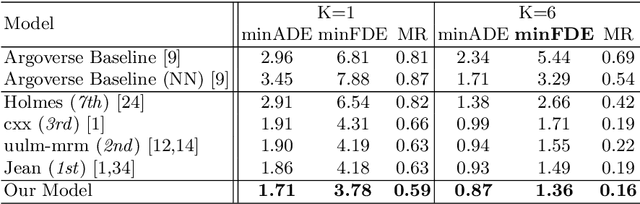
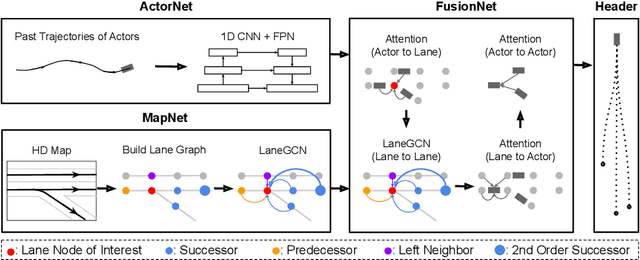
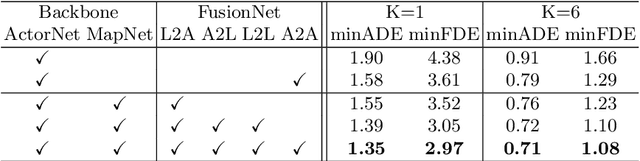
We propose a motion forecasting model that exploits a novel structured map representation as well as actor-map interactions. Instead of encoding vectorized maps as raster images, we construct a lane graph from raw map data to explicitly preserve the map structure. To capture the complex topology and long range dependencies of the lane graph, we propose LaneGCN which extends graph convolutions with multiple adjacency matrices and along-lane dilation. To capture the complex interactions between actors and maps, we exploit a fusion network consisting of four types of interactions, actor-to-lane, lane-to-lane, lane-to-actor and actor-to-actor. Powered by LaneGCN and actor-map interactions, our model is able to predict accurate and realistic multi-modal trajectories. Our approach significantly outperforms the state-of-the-art on the large scale Argoverse motion forecasting benchmark.