 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Information Accelerates Learning in RL
Paper and Code
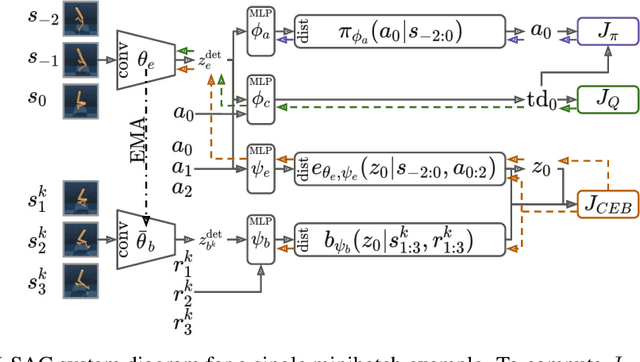
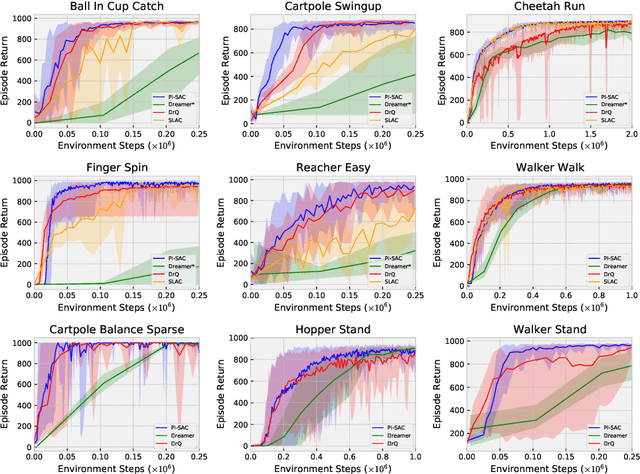
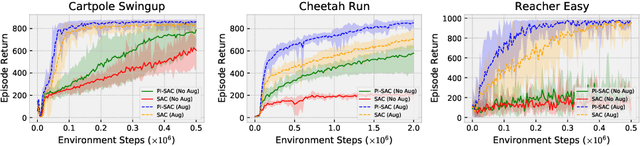
The Predictive Information is the mutual information between the past and the future, I(X_past; X_future). We hypothesize that capturing the predictive information is useful in RL, since the ability to model what will happen next is necessary for success on many tasks. To test our hypothesis, we train Soft Actor-Critic (SAC) agents from pixels with an auxiliary task that learns a compressed representation of the predictive information of the RL environment dynamics using a contrastive version of the Conditional Entropy Bottleneck (CEB) objective. We refer to these as Predictive Information SAC (PI-SAC) agents. We show that PI-SAC agents can substantially improve sample efficiency over challenging baselines on tasks from the DM Control suite of continuous control environments. We evaluate PI-SAC agents by comparing against uncompressed PI-SAC agents, other compressed and uncompressed agents, and SAC agents directly trained from pixels.