 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Multi-Objective Controller Optimization for a Magnetically-Levitated Nanopositioning System
Paper and Code
Jul 06, 2020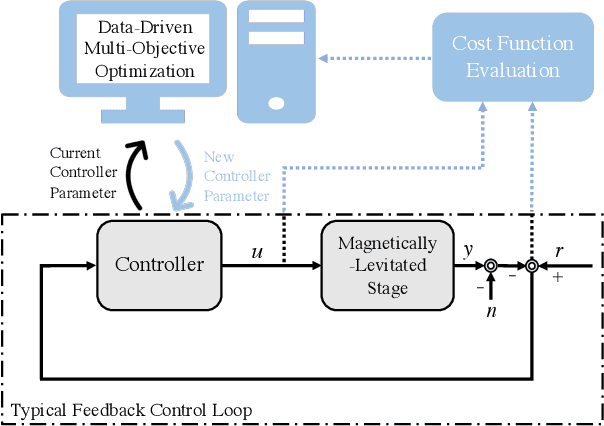
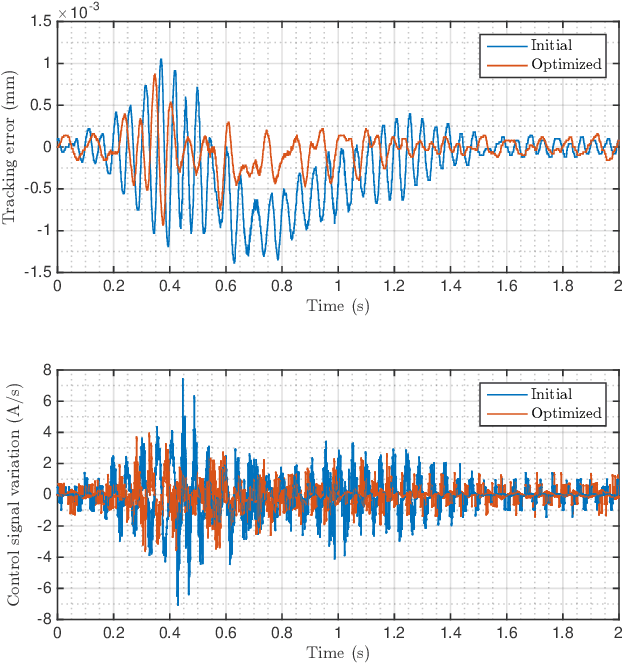
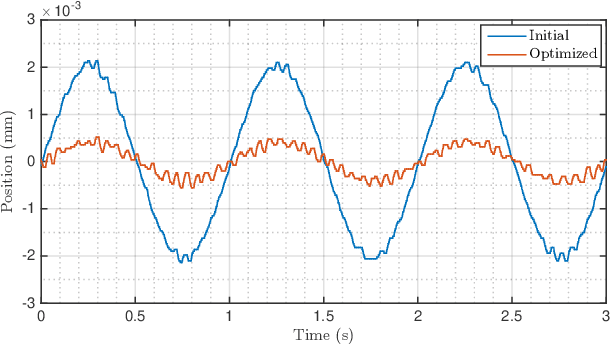
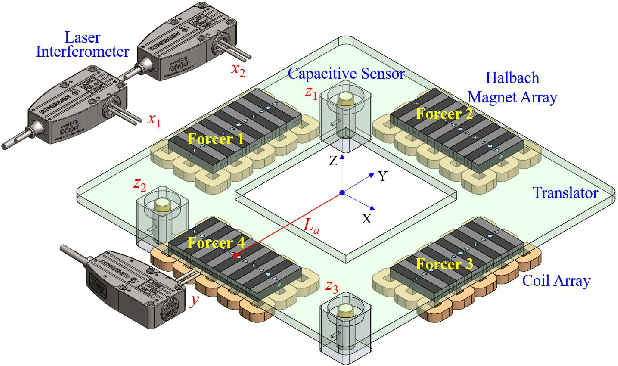
The performance achieved with traditional model-based control system design approaches typically relies heavily upon accurate modeling of the motion dynamics. However, modeling the true dynamics of present-day increasingly complex systems can be an extremely challenging task; and the usually necessary practical approximations often render the automation system to operate in a non-optimal condition. This problem can be greatly aggravated in the case of a multi-axis magnetically-levitated nanopositioning system where the fully floating behavior and multi-axis coupling make extremely accurate identification of the motion dynamics largely impossible. On the other hand, in many related industrial automation applications, e.g., the scanning process with the maglev system, repetitive motions are involved which could generate a large amount of motion data under non-optimal conditions. These motion data essentially contain rich information; therefore, the possibility exists to develop an intelligent automation system to learn from these motion data and to drive the system to operate towards optimality in a data-driven manner. Along this line then, this paper proposes a data-driven controller optimization approach that learns from the past non-optimal motion data to iteratively improve the motion control performance. Specifically, a novel data-driven multi-objective optimization approach is proposed that is able to automatically estimate the gradient and Hessian purely based on the measured motion data; the multi-objective cost function is suitably designed to take into account both smooth and accurate trajectory tracking. Experiments are then conducted on the maglev nanopositioning system to demonstrate the effectiveness of the proposed method, and the results show rather clearly the practical appeal of our methodology for related complex robotic systems with no accurate model available.