Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgedm_control: Software and Tasks for Continuous Control
Paper and Code
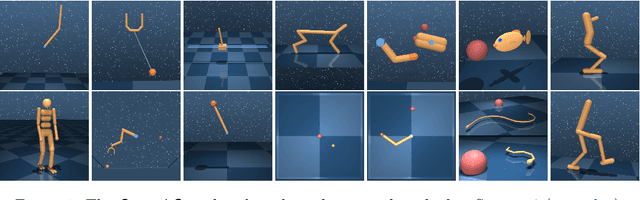
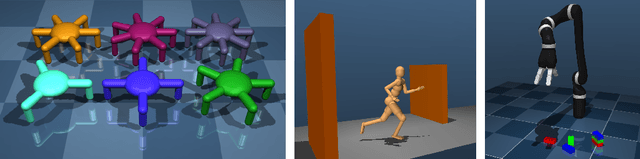
The dm_control software package is a collection of Python libraries and task suites for reinforcement learning agents in an articulated-body simulation. A MuJoCo wrapper provides convenient bindings to functions and data structures. The PyMJCF and Composer libraries enable procedural model manipulation and task authoring. The Control Suite is a fixed set of tasks with standardised structure, intended to serve as performance benchmarks. The Locomotion framework provides high-level abstractions and examples of locomotion tasks. A set of configurable manipulation tasks with a robot arm and snap-together bricks is also included. dm_control is publicly available at https://www.github.com/deepmind/dm_control
* arXiv admin note: text overlap with arXiv:1801.00690
View paper on