 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCenter-of-Mass-based Robust Grasp Planning for Unknown Objects Using Tactile-Visual Sensors
Paper and Code
Jun 01, 2020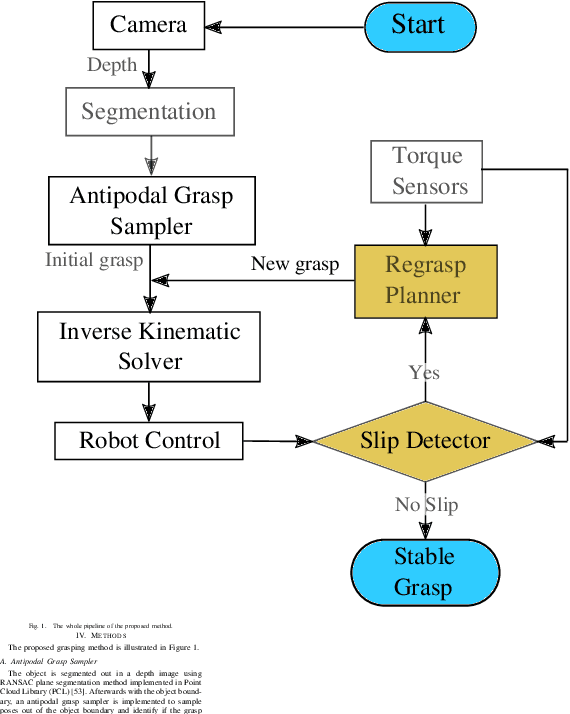
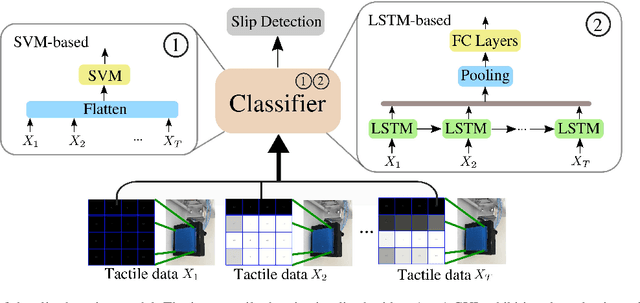
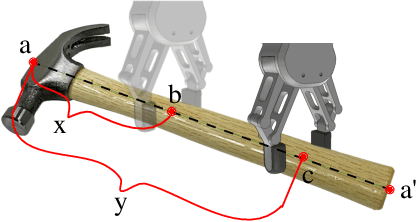
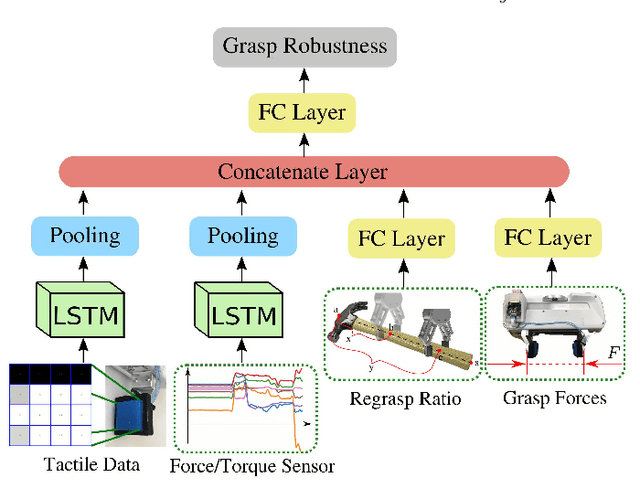
An unstable grasp pose can lead to slip, thus an unstable grasp pose can be predicted by slip detection. A regrasp is required afterwards to correct the grasp pose in order to finish the task. In this work, we propose a novel regrasp planner with multi-sensor modules to plan grasp adjustments with the feedback from a slip detector. Then a regrasp planner is trained to estimate the location of center of mass, which helps robots find an optimal grasp pose. The dataset in this work consists of 1 025 slip experiments and 1 347 regrasps collected by one pair of tactile sensors, an RGB-D camera and one Franka Emika robot arm equipped with joint force/torque sensors. We show that our algorithm can successfully detect and classify the slip for 5 unknown test objects with an accuracy of 76.88% and a regrasp planner increases the grasp success rate by 31.0% compared to the state-of-the-art vision-based grasping algorithm.