 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEuclideanizing Flows: Diffeomorphic Reduction for Learning Stable Dynamical Systems
Paper and Code
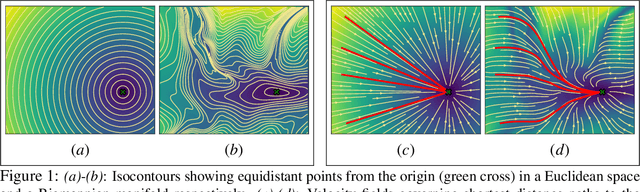
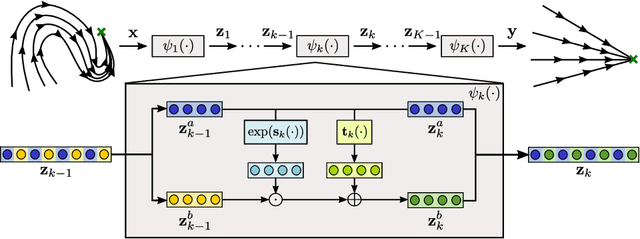
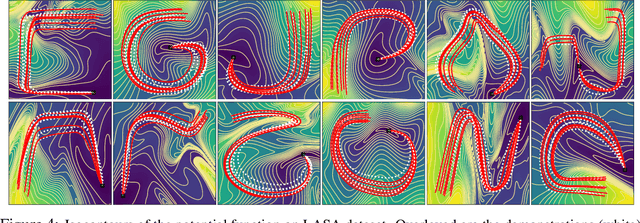
Robotic tasks often require motions with complex geometric structures. We present an approach to learn such motions from a limited number of human demonstrations by exploiting the regularity properties of human motions e.g. stability, smoothness, and boundedness. The complex motions are encoded as rollouts of a stable dynamical system, which, under a change of coordinates defined by a diffeomorphism, is equivalent to a simple, hand-specified dynamical system. As an immediate result of using diffeomorphisms, the stability property of the hand-specified dynamical system directly carry over to the learned dynamical system. Inspired by recent works in density estimation, we propose to represent the diffeomorphism as a composition of simple parameterized diffeomorphisms. Additional structure is imposed to provide guarantees on the smoothness of the generated motions. The efficacy of this approach is demonstrated through validation on an established benchmark as well demonstrations collected on a real-world robotic system.