 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTriple-GAIL: A Multi-Modal Imitation Learning Framework with Generative Adversarial Nets
Paper and Code
May 22, 2020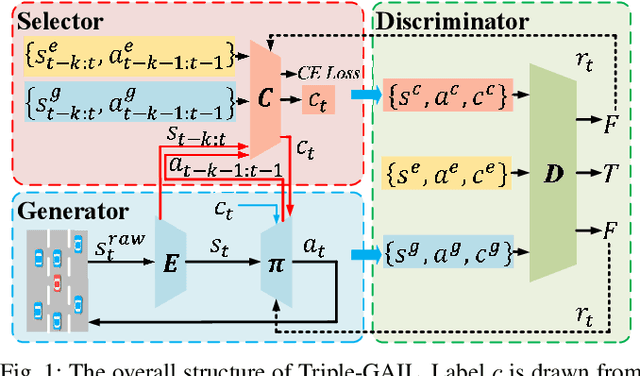
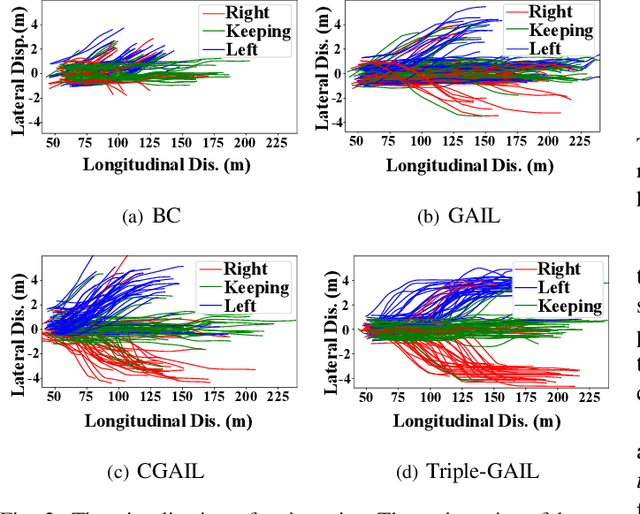
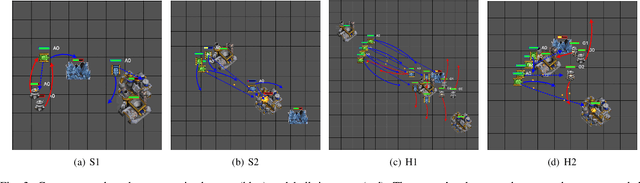
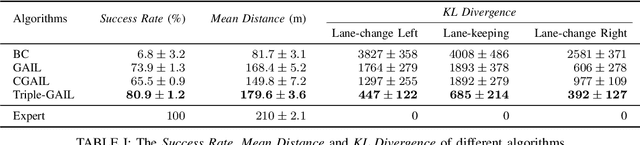
Generative adversarial imitation learning (GAIL) has shown promising results by taking advantage of generative adversarial nets, especially in the field of robot learning. However, the requirement of isolated single modal demonstrations limits the scalability of the approach to real world scenarios such as autonomous vehicles' demand for a proper understanding of human drivers' behavior. In this paper, we propose a novel multi-modal GAIL framework, named Triple-GAIL, that is able to learn skill selection and imitation jointly from both expert demonstrations and continuously generated experiences with data augmentation purpose by introducing an auxiliary skill selector. We provide theoretical guarantees on the convergence to optima for both of the generator and the selector respectively. Experiments on real driver trajectories and real-time strategy game datasets demonstrate that Triple-GAIL can better fit multi-modal behaviors close to the demonstrators and outperforms state-of-the-art methods.