 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrosophila-Inspired 3D Moving Object Detection Based on Point Clouds
Paper and Code
May 06, 2020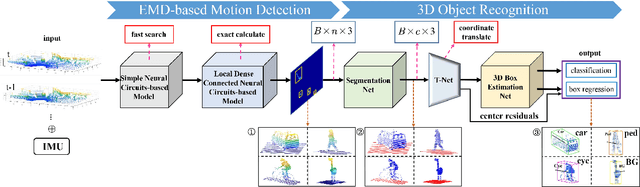
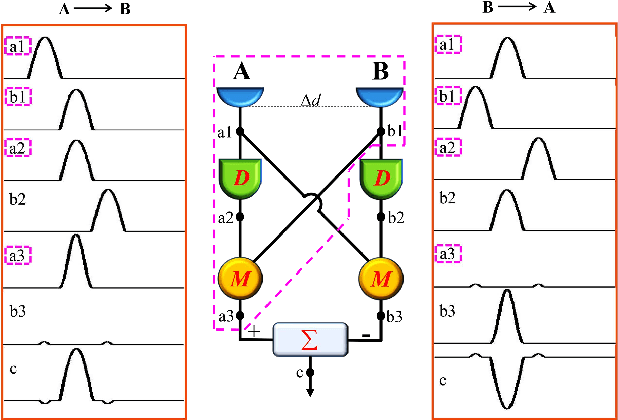
3D moving object detection is one of the most critical tasks in dynamic scene analysis. In this paper, we propose a novel Drosophila-inspired 3D moving object detection method using Lidar sensors. According to the theory of elementary motion detector, we have developed a motion detector based on the shallow visual neural pathway of Drosophila. This detector is sensitive to the movement of objects and can well suppress background noise. Designing neural circuits with different connection modes, the approach searches for motion areas in a coarse-to-fine fashion and extracts point clouds of each motion area to form moving object proposals. An improved 3D object detection network is then used to estimate the point clouds of each proposal and efficiently generates the 3D bounding boxes and the object categories. We evaluate the proposed approach on the widely-used KITTI benchmark, and state-of-the-art performance was obtained by using the proposed approach on the task of motion detection.