 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring Spatial Uncertainty in Object Detection
Paper and Code
Mar 07, 2020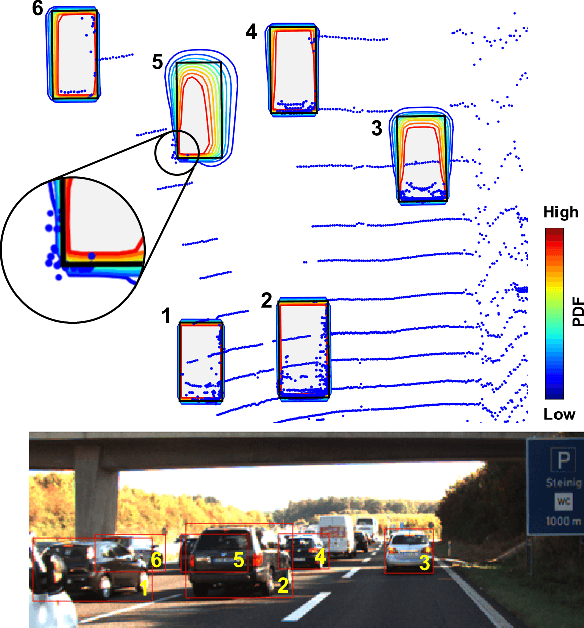
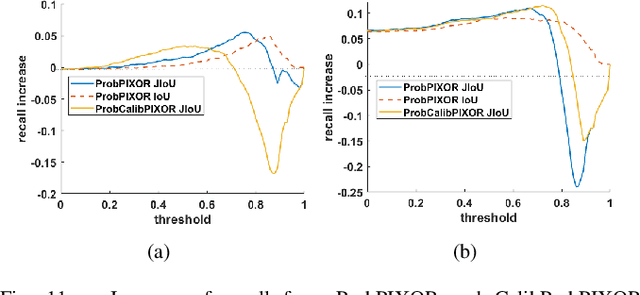
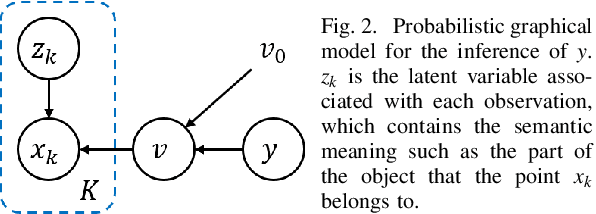
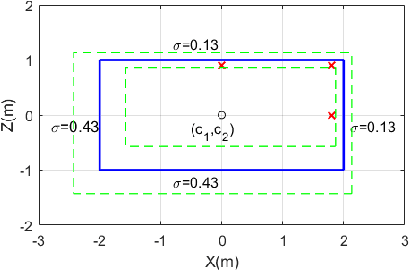
The availability of real-world datasets is the prerequisite to develop object detection methods for autonomous driving. While ambiguity exists in object labels due to error-prone annotation process or sensor observation noises, current object detection datasets only provide deterministic annotations, without considering their uncertainty. This precludes an in-depth evaluation among different object detection methods, especially for those that explicitly model predictive probability. In this work, we propose a generative model to estimate bounding box label uncertainties from LiDAR point clouds, and define a new representation of the probabilistic bounding box through spatial distribution. Comprehensive experiments show that the proposed model represents uncertainties commonly seen in driving scenarios. Based on the spatial distribution, we further propose an extension of IoU, called the Jaccard IoU (JIoU), as a new evaluation metric that incorporates label uncertainty. The experiments on the KITTI and the Waymo Open Datasets show that JIoU is superior to IoU when evaluating probabilistic object detectors.