 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLESS is More: Rethinking Probabilistic Models of Human Behavior
Paper and Code
Jan 13, 2020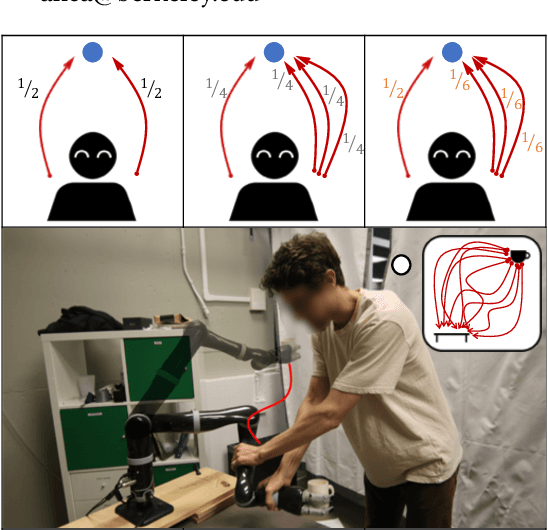
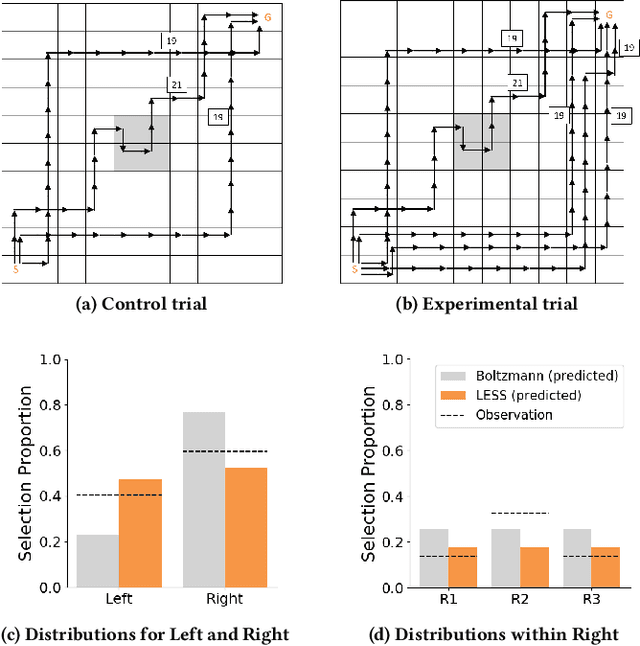
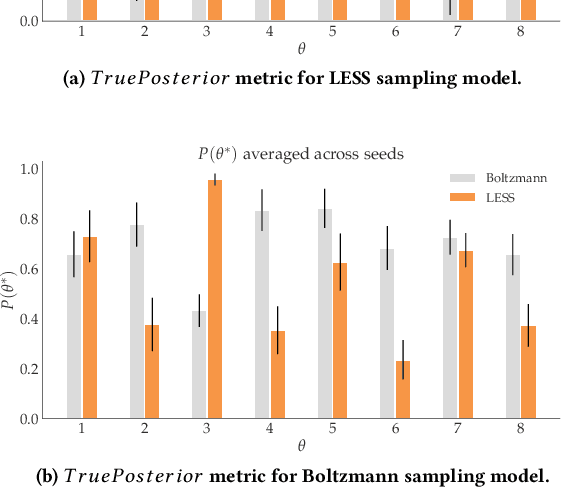
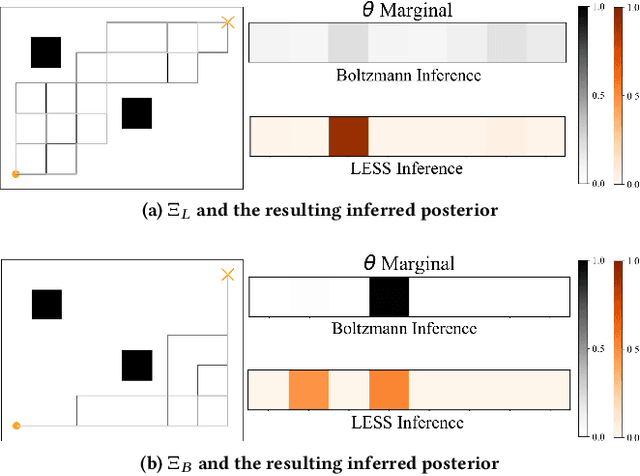
Robots need models of human behavior for both inferring human goals and preferences, and predicting what people will do. A common model is the Boltzmann noisily-rational decision model, which assumes people approximately optimize a reward function and choose trajectories in proportion to their exponentiated reward. While this model has been successful in a variety of robotics domains, its roots lie in econometrics, and in modeling decisions among different discrete options, each with its own utility or reward. In contrast, human trajectories lie in a continuous space, with continuous-valued features that influence the reward function. We propose that it is time to rethink the Boltzmann model, and design it from the ground up to operate over such trajectory spaces. We introduce a model that explicitly accounts for distances between trajectories, rather than only their rewards. Rather than each trajectory affecting the decision independently, similar trajectories now affect the decision together. We start by showing that our model better explains human behavior in a user study. We then analyze the implications this has for robot inference, first in toy environments where we have ground truth and find more accurate inference, and finally for a 7DOF robot arm learning from user demonstrations.