 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamics Learning with Cascaded Variational Inference for Multi-Step Manipulation
Paper and Code
Oct 29, 2019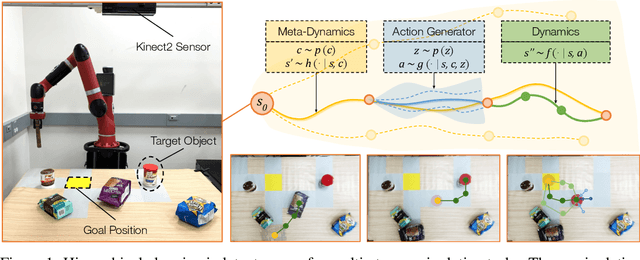
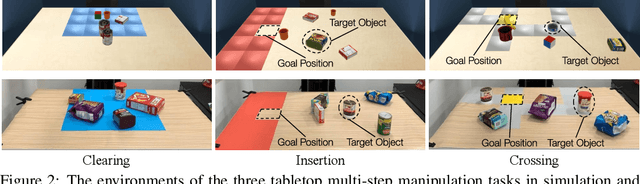
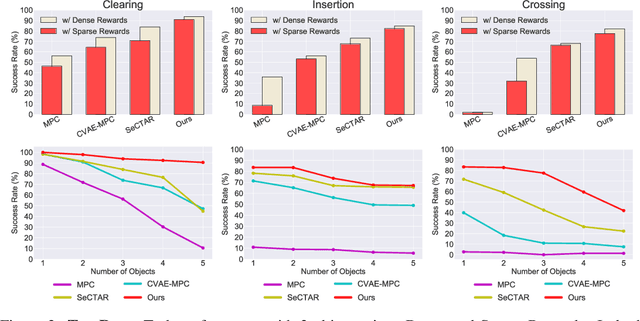
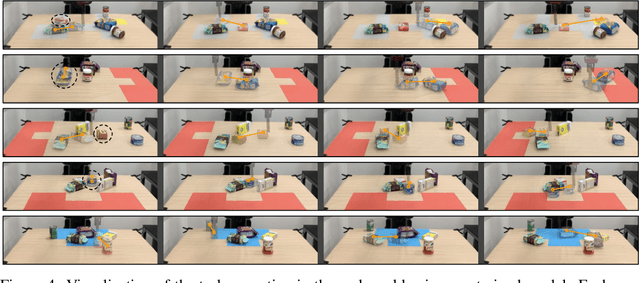
The fundamental challenge of planning for multi-step manipulation is to find effective and plausible action sequences that lead to the task goal. We present Cascaded Variational Inference (CAVIN) Planner, a model-based method that hierarchically generates plans by sampling from latent spaces. To facilitate planning over long time horizons, our method learns latent representations that decouple the prediction of high-level effects from the generation of low-level motions through cascaded variational inference. This enables us to model dynamics at two different levels of temporal resolutions for hierarchical planning. We evaluate our approach in three multi-step robotic manipulation tasks in cluttered tabletop environments given high-dimensional observations. Empirical results demonstrate that the proposed method outperforms state-of-the-art model-based methods by strategically interacting with multiple objects.