 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOCTNet: Trajectory Generation in New Environments from Past Experiences
Paper and Code
Sep 25, 2019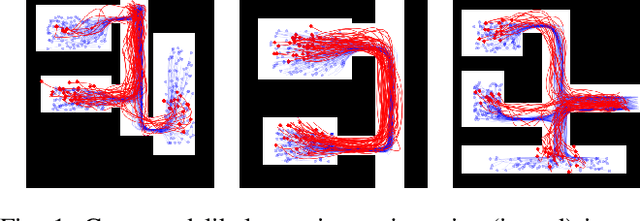
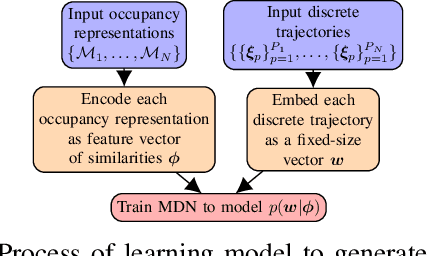
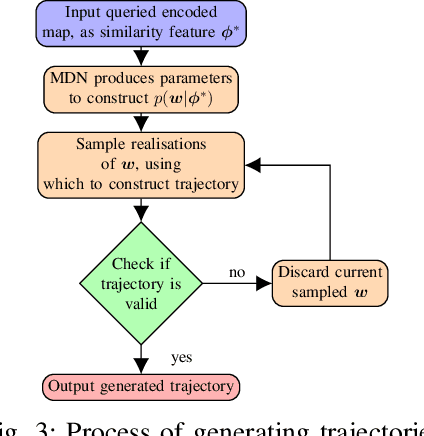
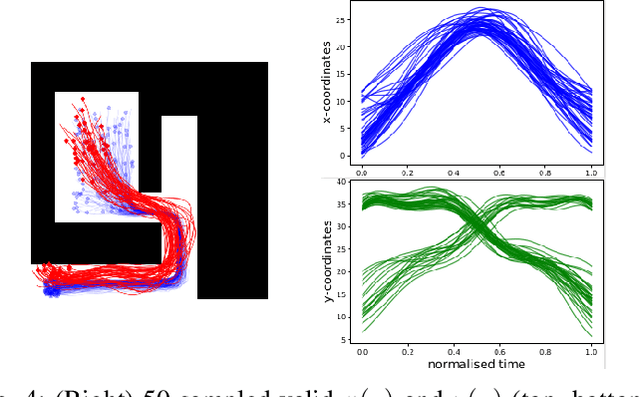
Being able to safely operate for extended periods of time in dynamic environments is a critical capability for autonomous systems. This generally involves the prediction and understanding of motion patterns of dynamic entities, such as vehicles and people, in the surroundings. Many motion prediction methods in the literature can learn a function, mapping position and time to potential trajectories taken by people or other dynamic entities. However, these predictions depend only on previously observed trajectories, and do not explicitly take into consideration the environment. Trends of motion obtained in one environment are typically specific to that environment, and are not used to better predict motion in other environments. In this paper, we address the problem of generating likely motion dynamics conditioned on the environment, represented as an occupancy map. We introduce the Occupancy Conditional Trajectory Network (OCTNet) framework, capable of generalising the previously observed motion in known environments, to generate trajectories in new environments where no observations of motion has not been observed. OCTNet encodes trajectories as a fixed-sized vector of parameters and utilises neural networks to learn conditional distributions over parameters. We empirically demonstrate our method's ability to generate complex multi-modal trajectory patterns in different environments.