 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Seek: Autonomous Source Seeking with Deep Reinforcement Learning Onboard a Nano Drone Microcontroller
Paper and Code
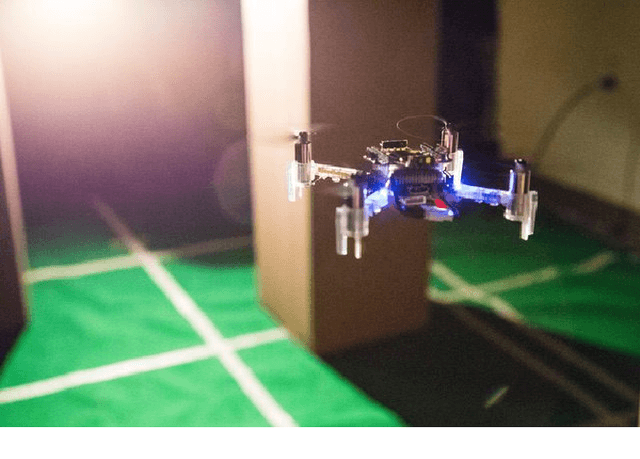
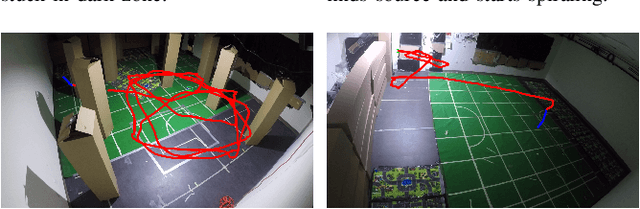
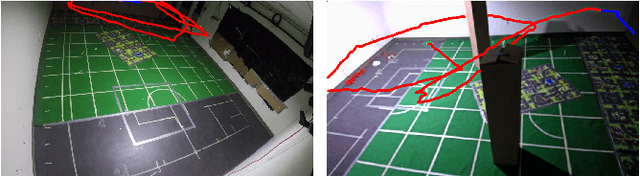
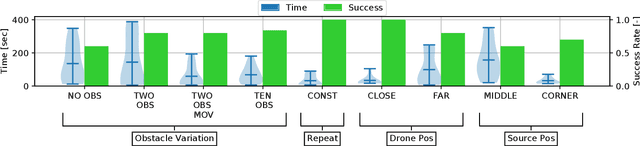
Fully autonomous navigation using nano drones has numerous applications in the real world, ranging from search and rescue to source seeking. Nano drones are well-suited for source seeking because of their agility, low price, and ubiquitous character. Unfortunately, their constrained form factor limits flight time, sensor payload, and compute capability. These challenges are a crucial limitation for the use of source-seeking nano drones in GPS-denied and highly cluttered environments. Hereby, we introduce a fully autonomous deep reinforcement learning-based light-seeking nano drone. The 33-gram nano drone performs all computation on-board the ultra-low-power microcontroller (MCU). We present the method for efficiently training, converting, and utilizing deep reinforcement learning policies. Our training methodology and novel quantization scheme allow fitting the trained policy in 3 kB of memory. The quantization scheme uses representative input data and input scaling to arrive at a full 8-bit model. Finally, we evaluate the approach in simulation and flight tests using a Bitcraze CrazyFlie, achieving 80% success rate on average in a highly cluttered and randomized test environment. Even more, the drone finds the light source in 29% fewer steps compared to a baseline simulation (obstacle avoidance without source information). To our knowledge, this is the first deep reinforcement learning method that enables source seeking within a highly constrained nano drone demonstrating robust flight behavior. Our general methodology is suitable for any (source seeking) highly constrained platform using deep reinforcement learning.