 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject grasping planning for the situation when soft and rigid objects are mixed together
Paper and Code
Sep 20, 2019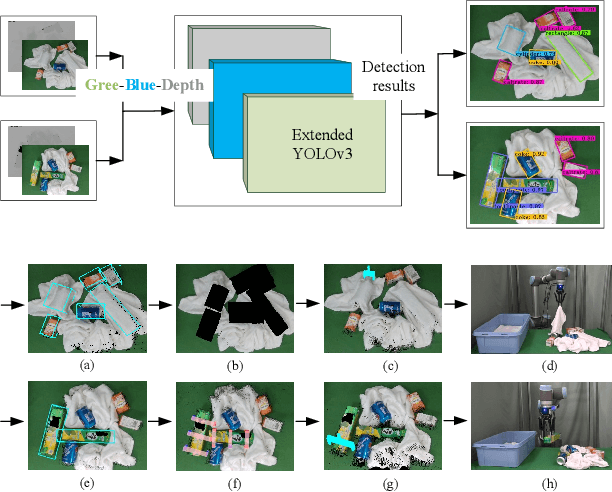
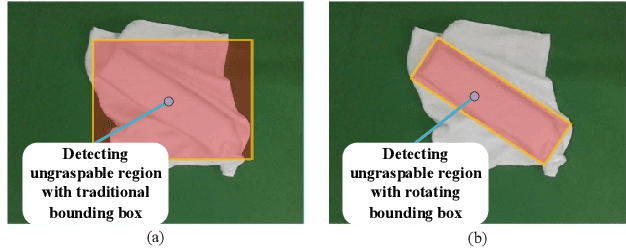
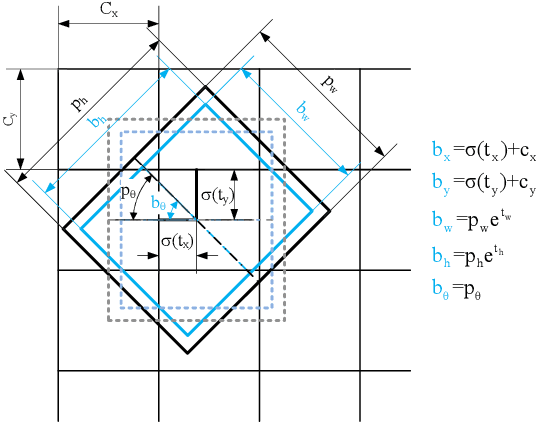
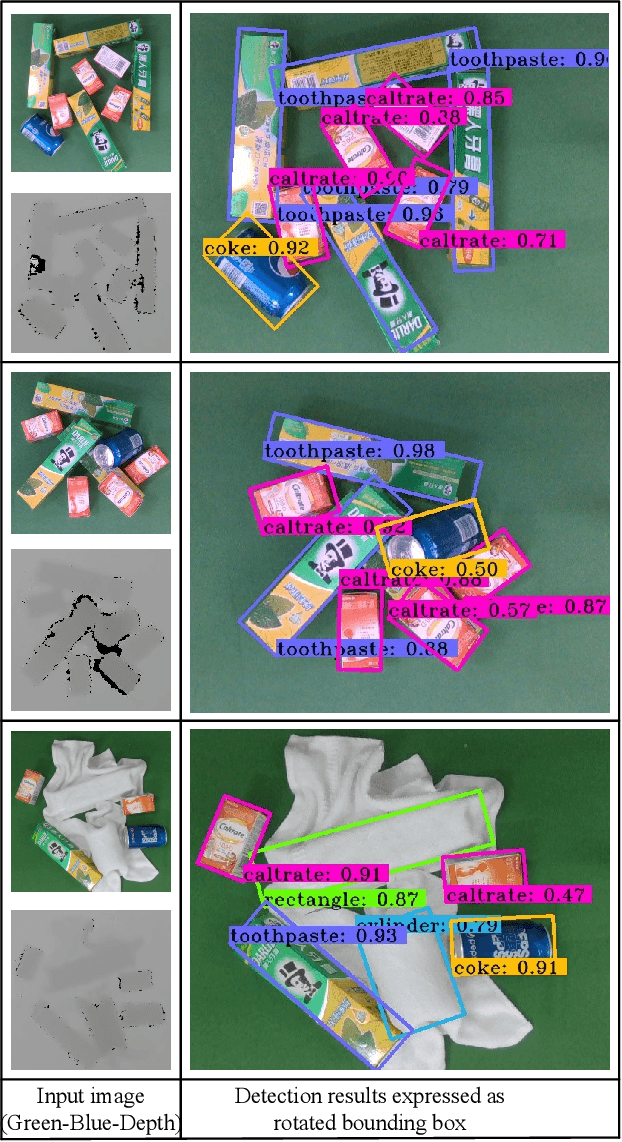
In this paper, we propose a object detection method expressed as rotated bounding box to solve grasping challenge in the scenes where rigid objects and soft objects are mixed together. Compared with traditional detection methods, this method can output the angle information of rotated objects and thus can guarantee that within each rotated bounding box, there is a single instance. This technology is especially useful in the case of pile of objects with different orientations. In our method, when uncategorized objects with specific geometry shapes (rectangle or cylinder) are detected, the program will conclude that some rigid objects are covered by the towels. If no covered objects are detected, the grasp planning is based on 3D point cloud obtained from the mapping between 2D object detection result and its corresponding 3D point cloud. Based on the information provided by the 3D bounding box covering the object, grasping strategy for multiple cluttered rigid objects, collision avoidance strategy are proposed. The proposed method is verified by the experiment in which rigid objects and towels are mixed together.