 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMANAS: Multi-Agent Neural Architecture Search
Paper and Code
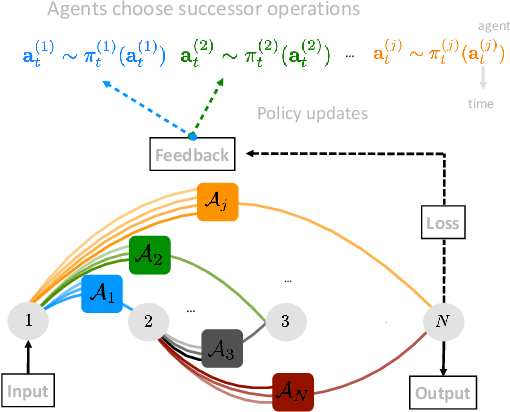
The Neural Architecture Search (NAS) problem is typically formulated as a graph search problem where the goal is to learn the optimal operations over edges in order to maximise a graph-level global objective. Due to the large architecture parameter space, efficiency is a key bottleneck preventing NAS from its practical use. In this paper, we address the issue by framing NAS as a multi-agent problem where agents control a subset of the network and coordinate to reach optimal architectures. We provide two distinct lightweight implementations, with reduced memory requirements (1/8th of state-of-the-art), and performances above those of much more computationally expensive methods. Theoretically, we demonstrate vanishing regrets of the form O(sqrt(T)), with T being the total number of rounds. Finally, aware that random search is an, often ignored, effective baseline we perform additional experiments on 3 alternative datasets and 2 network configurations, and achieve favourable results in comparison.