 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Objects Against LiDAR-Based Autonomous Driving Systems
Paper and Code
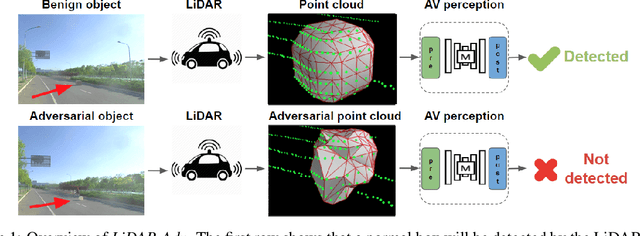
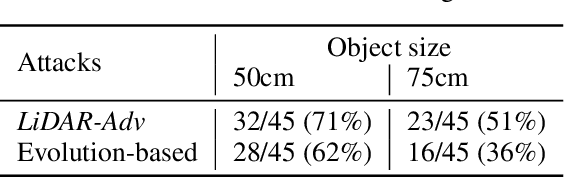

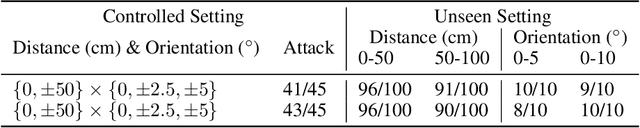
Deep neural networks (DNNs) are found to be vulnerable against adversarial examples, which are carefully crafted inputs with a small magnitude of perturbation aiming to induce arbitrarily incorrect predictions. Recent studies show that adversarial examples can pose a threat to real-world security-critical applications: a "physical adversarial Stop Sign" can be synthesized such that the autonomous driving cars will misrecognize it as others (e.g., a speed limit sign). However, these image-space adversarial examples cannot easily alter 3D scans of widely equipped LiDAR or radar on autonomous vehicles. In this paper, we reveal the potential vulnerabilities of LiDAR-based autonomous driving detection systems, by proposing an optimization based approach LiDAR-Adv to generate adversarial objects that can evade the LiDAR-based detection system under various conditions. We first show the vulnerabilities using a blackbox evolution-based algorithm, and then explore how much a strong adversary can do, using our gradient-based approach LiDAR-Adv. We test the generated adversarial objects on the Baidu Apollo autonomous driving platform and show that such physical systems are indeed vulnerable to the proposed attacks. We also 3D-print our adversarial objects and perform physical experiments to illustrate that such vulnerability exists in the real world. Please find more visualizations and results on the anonymous website: https://sites.google.com/view/lidar-adv.